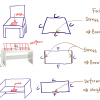
Validation of our approach How compare accuracy There are different ways of comparing result accuracy: Ratio of the maximum deflection calculated by the numerical solution to the corresponding values obtained analytically [1] [2] Ratio of deflection of deflection at a particular point...
This week, we are collecting some green ball data using the cellphone camera and esp32 cam. We've collected three different sets of photos with different resolution: (1) Cellphone camera, resolution: 3264 * 2448 (2) esp32-cam, resolution: 1280 * 1024 (3) esp32-cam, resolution: 800 * 600...

The design parameters space: The performance evaluation system and performance:

This week, I've tested the different relationship between voltage -thrust with different motor + propeller combination. The different motor+propeller combination is shown as follows: (1) Propeller forward turning vs. Propeller reverse turning (2) Propeller forward turning vs. Propeller rev...

I reimplemented the Gtech paper for primitive monocular depth estimation. It works relatively well but requires a certain measurement of the object before the estimation. Reference - N. Yao, E. Anaya, Q. Tao, S. Cho, H. Zheng and F. Zhang, "Monocular vision-based human following on miniature robot...
To explore another method for object detection, I have built the pipeline to stream the video feed from the camera to the laptop and run the model on the video stream. Therefore, we now have the functionality to use any ML / neural network model for object detection Github Repo - https://github.co...

I explored the idea of running object detection on the microcontroller itself. I explored the following libraries – Tensorflow Lite ESP WHO Eloquent Conclusion – I found the TensorFlow lite library extremely unstable. There are many bugs in the repo. I was not able to build a single exampl...

Based on the new rule: No use of adhesives for capturing game balls. We now need to design a ball capture mechanism without using adhesives. Some requirement about this capture mechanism: Functionally, it should be able to easily catch and release the ball From design aspect, it should be l...

We are working towards a fully decenatralize lifelong path planner for multi-agent path finding. To that end we have built an Open.ai gym environment which can be found here: https://github.com/pehuenmoure/warehouse_rrl. Our environment environment will be used for training our agents and analyzing...

I've been thinking about the next direction I can put into my DARPA paper. I'm puting some ideas together, the overall framework is that I would like to solve a multi-agent planning problem: Here are some relative concepts that tight into this problem: Multi-agent planning: multiagent plan...