During the past week, I have been doing background study on plate theory. The short term goal is to be able to determine plate behavior when applied loads. The long term goal is to be able to determine behavior of arbitrary foldable structures (which are assembled with plates), with different bounda...
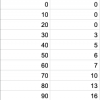
Today I tested the lift force generated by two small propellers. In order to use a kitchen scale to measre the lift, i use a piece of plastic wrap to block the air flow to the scale, which may not be really accurate for the measure. The result is:

I built a prototype version that attached motor propellers on to the clownfish balloon. This experiment is gain more intuition on making the gondola, and testing the speed of clownfish balloon that uses propellers. The experiment set up: Environment Temperature: 21°c Testing space: Length 138...
I tested the wireless control of the motors. As long as the raspberry pi zero w is under the same wifi network as of my computer, we can wirelessly control the motors. Your browser does not support the video tag. The gondola is also a simple version using pla to print. The weight of it is 8g.
So far, I have been able to create functional printable robots. However, the printable robots are still tethered to off-board power, which limits their potential. Recently, I am working on designing autonomous robots by integrating printed battery into our printable manufacturing paradigm. For the n...

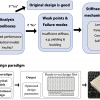
At first, I started with the okvis project to build my own BOEM SLAM. After spending several weeks understanding what is going on in that well-established project, I realized that there is not way to develop and to test on that project. What I need is to build a project with smaller scale that I can...
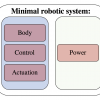
Project High-Level View I propose the following as the high level view for designing foldable robots. ICRA Project Goal For the next two months, I will be focusing on designing structural elements, which is a major component in foldable robotic systems. I will build analysis design toolbox t...

This week I conducted test of sticking 3D printed gondola to the envelope which is the mylar balloon. The material of the gondola is PLA and the material of the balloon is mylar. The test assumes that the interacting surface of gondola is plane, however, the surface on the balloon is not always...

For testing this week, I used the Air Swimmer blimp and made different modifications to it. My end goal was to determine whether propellers or using a flapping motion was a more effective way of providing thrust for our balloon. First, I did some basic flight tests to see how well it moved around...

The past few days, I have worked on implementing a pre-built flapping technology on helium balloons of different shapes and sizes running tests with them. Although the experiment did not go as planned (for reasons I will discuss later), I will discuss what did occur as I ran my first iteration of th...