This week I also tested the power consumption while operating the blimp. The test is run under the setup that: 2 motors are running the whole time in 80% PWM 500 mAh 3.7v lipo battery The initial voltage of the 3.7v battery is 4.16v, which is fully charged. And I measure the voltage of the bat...
This week I conducted the test simulating a single blimp in the competition capturing the ball and send it to the goal. The components in the test are not exactly the same as what will be used in the competition, however, it is still a good test to show the capability of the blimp. here is the v...
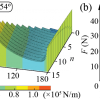
Quick Reminder: Goal: computational design and fabrication of corrugated mechanisms from behavioral specifications We studied double layered corrugation mechanism. The purpose is to increase stiffness in foldable structures. We also provide a simple model for optimial design based on maximum s...
I have been working on testing power consumption. Below are the results for the brushless and brushed dc motors we currently have. This means that with a 1000 mAh battery, we can run one of these motors for about seven hours. This result is quite good, but I need to extend the test for longer an...

Knowledge of a lighter-than-air vehicle's orientation is an essential initial step in ensuring stable operation. I have been working on implementing a sensor fusion system for the blimps on the FORAY project. The current implementation uses a 6-DOF IMU, the MPU6050. The experimental setup can be...