Here is the prelab for the competition in November. link

This week i fabricate a defender balloon. It's made of two sphere balloon while there is net between them.
This week, I compare two different motor configuration as shown below. The test is run under the setup: A commander controls the blimp to touch both sides of the wall and then go to its starting position, the time cost is recorded. Each configuration of the motors will be tested 10 times...
This week, I assemble the second blimp while I can switch the control between the two blimps using Blynk app. This is important because we have very limited number of commander while the number of blimps is at least the double of the number of commanders. Video:

I did a test of different motor configuration than before. In this motor configuration, each of the three motors will control 1 DoF.

I improved the design of gondola that the current version has a lighter weight than before. And the motor drivers are fixed onto the gondola to be more stable. Also, 1'' jumper wires are used to reduce the total weight. Before: After:
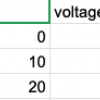
This week I also tested the power consumption while operating the blimp. The test is run under the setup that: 2 motors are running the whole time in 80% PWM 500 mAh 3.7v lipo battery The initial voltage of the 3.7v battery is 4.16v, which is fully charged. And I measure the voltage of the bat...
This week I conducted the test simulating a single blimp in the competition capturing the ball and send it to the goal. The components in the test are not exactly the same as what will be used in the competition, however, it is still a good test to show the capability of the blimp. here is the v...

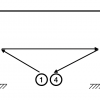
In the previous test, the result shows that the turning ability of the configuration used for the shark robot is not good. The reason is the turning torque generated by two motors located beneath the balloon is not large enough. Therefore, in this test, I put the motors on the side of the balloon...

This week I managed to integrate the system of the blimp and conducted a flying test. 1. System Overview Micro controller: NodeMCU ESP8266 board Motor driver: TB6612 Motor: 53,000 rmp motor Propeller: 65mm propeller Gondola: 3D printed Sticking method: Hook and loop tape 2. Control...