13
Sep
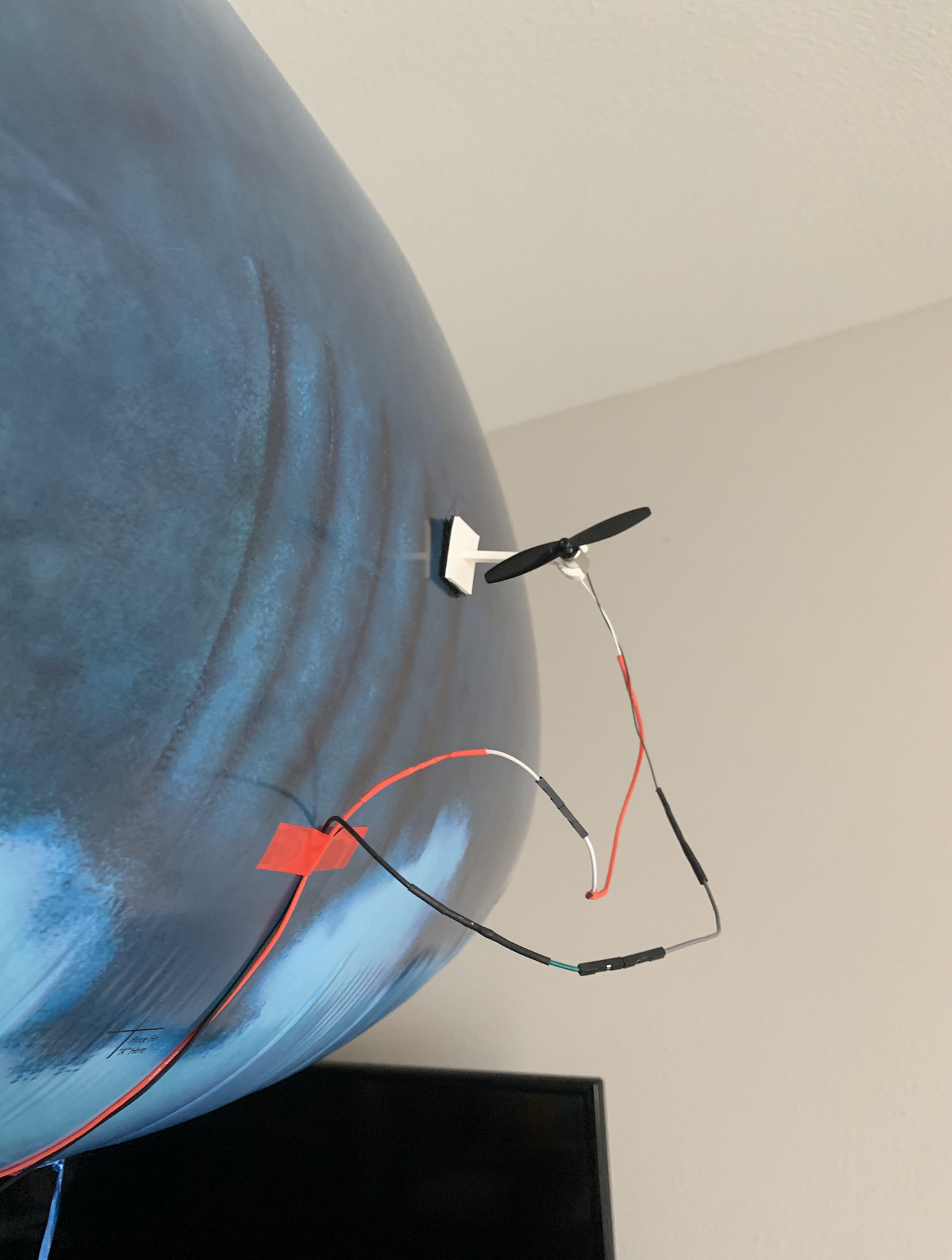
Foray -- Turning Ability Test: Propellers on the side
Jiahao(Nick) Li blimp fly test motor distributionIn the previous test, the result shows that the turning ability of the configuration used for the shark robot is not good. The reason is the turning torque generated by two motors located beneath the balloon is not large enough.
Therefore, in this test, I put the motors on the side of the balloon and the turning ablility turns out to be good enough.
Below are the videos and pictures.