
Last week, I tried different ways of manufacturing balloon. And it turned out the soldering iron way is the best way for one person to do that in the lab. Last Friday, I successfully manufactured one in the lab, as shown in the following figures. And the following figure is what happened afte...
After setting up the crazyflie as a blimp and performing various tests, one primary issue was noticed when attempting to control the blimp. This issue was in the yaw control; I noticed that for large yaw inputs, the blimp would not turn left or right. Instead, the left and right motors would alterna...

The source code of this project is https://git.uclalemur.com/zhz03/DARPA_CREATE_Code/-/tree/master/

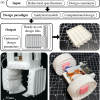
This week, I tried three different ways to DIY custom mylar foil balloon: Multipurpose Adhesive + super glue to seal the mylar foil Soldering iron to seal the foil Soldering iron to seal first and then multipurpose adhesive to double seal It turns out all these method have s...
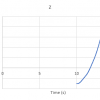
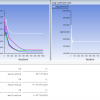
This week, we conducted lots of flying test under Opti-track system. Here we showed one example of vertical flying test. After data has been processed: position plot: velocity plot:

This notes are quick notes after I have tested all Create code in practice. It contains the terms which easy to make people puzzled and somethings left to do. I marked this note in case to forget before I continue to finish the left parts. Important terms in code: binary_1d: u (event) is binary...
IROS Submitted I am happy to have our IROS paper submitted. Here is our paper on arXiv. Here you can find the demo video. Here you can find all document (e.g. designs, codes, drawings). Here are all videos. Thank you everyone for your support! ICRA Accepted Congratulations to Wenz...

The crazyflie test setup is shown in the figure: Fly test on crazyflie: I found some bugs on this design and I'm trying to fix that right now.
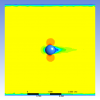
This week, I sucessfully used Ansys fluent software to get the CFD analysis of specified saucer-shape balloon as shown in the following figures.
It took me quite amount of time to finish calculating the drag coefficient of this example(plane) in analysis fluent. Drag coefficient calculation: Fluid relative velocity plot: