
I have been working on brainstorming and prototyping different methods that enable the fleet of blimps the FORAY team is developing to corral a balloon and score it in the appropriate goal. Some factors I need to take into consideration includes the weight of the mechanism, whether we want a passive...

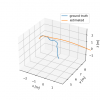
Goal It is common to test and to compare algorithms on synthetic data. Some properties might be more noticeable when we can control the data generating process. In addition, it also helps debugging. Forster et al, IEEE Trans. on Robotics, 2017 Sjanic et al, IEEE Trans. on Aerospace and Elect...
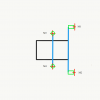
We designed a reconfigurable gondola and motor beam that could allow us to test different thrust configuration efficiently. Here are two examples: The different configuration that we would like to test: (The following figures are all top view) The research questions that we want...
For explicit-landmark optimization-based SLAM systems, the skeleton of SLAM backend can be considered as a nonlinear least-squares optimization problem, or \((\hat{s}_{1:n}, \hat{\lambda}) = {arg\,min}_{({s}_{1:n}, {\lambda})}\, \sum_{t=0}^{n-1} \| s_{t+1} - f(s_t, u_t) \|^2_{Q} + \sum_{t=1}^n \| o...

I determined the change in the signal strength of the network due to metal interference. I used the same setup as the previous experiment. Received Signal Strength Indicator (RSSI) was used as a metric to measure signal strength. ESP32 WIFI (2.4 GHz) A point to point connection was established u...

I've integrated all the components and tested the manual control. The necessary components for manual control are: Control board: NodeMCU Motor driver: tb6612fln Motor + 55mm propeller 1000 mAh 3.7v Li-po battery This hardware configuration allows the blimp to perform these operations...

Project goal: design toolbox An example design paradigm (Library #2) is shown below, with all edges simply-supported and distributed load across the entire top surface as an example. This week I have been searching existing methods/solutions for calculating reaction load on edges of a plat...

Objective To observe how a designer (especially non-engineer) would express design intent using free-hand gesture through object manipulation Manipulation types: (general: ) overall scale, specific angle partial scale entangled angle discrete property Experiment instruction Look at...

Motivation The objective of the experiments was to test various communication methods (different protocols and frequency) under different conditions. I am using the following communication devices – ESP32 Wifi Module – 2.4GHz ESP32 Bluetooth Low Energy – 2.4 GHz NRF24L01 module - 2.4GHz Lo...

I have been working on taking power consumption measurements of the arduino nano control board, as well as the motors and wireless receivers. Unfortunately, Amazon had some problems with delivery and I was unable to receive the current reading board and the motor driver this week. I was planning on...