I've integrated all the components and tested the manual control.
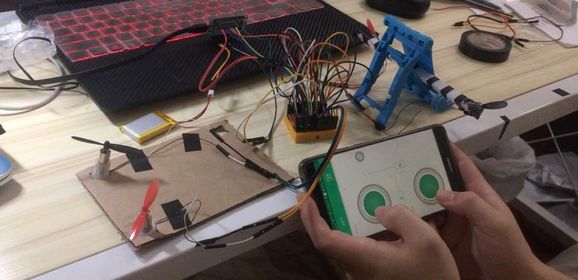
The necessary components for manual control are:
- Control board: NodeMCU
- Motor driver: tb6612fln
- Motor + 55mm propeller
- 1000 mAh 3.7v Li-po battery
This hardware configuration allows the blimp to perform these operations: (1) Move forward (2) Move backward (3) Turn left (4) Turn right (5) Move up (6) Move down