It's been a while since my last post, and although there has been some interesting work on more example designs (which just got sent to fab 🎉) that'll be another post for another day, hopefully with some fun videos. But today, we revisit an old friend: refactoring the compiler. Again. IntelliJ...
The 8-week summer program has ended, but that does not mean that this project ended. For whoever decides to pick up this project in the future I would like to leave some tips to help you get started. The Github contains various folders: DXF_Files Contains a collection of .dxf files which a...
I reviewed a couple of papers Physical reservoir computing with origami and its application to robotic crawling Recent advances in physical reservoir computing: A review Reservoir Computing: Main takeaways (rough) Physical body of robot takes part in performing low-level control tasks M...

While there has been much work on example boards and core logic over the past months, that work has exposed limitations and UI quirks that have impeded work. Now that the main features are done, it's time decompress and clean up some of that cruft, in particular to maintain development velocity goin...

This week I was able to make a square cell using wood and foam. On my previous blog posts I had been working with acrylic paper, which has some relative movement vertically and horizontally. My goal was to limit the degrees of freedom of the auxetic structure to be only horizontal at the hinges. I'm...
This past week I have been working on physically creating auxetic cell array dicussed in my past blog post. To manufacture these cell arrangments I decided to use the following materials: cardstock, Polyethylene terephthalate (PET), and Polyeurethane rubber. (Images present the materials in that o...

This week I focused on fine tuning my RoCo component designs to fit with the electronics and assemble my first fully functional cut and fold robot. I wanted to make sure that my method for production would be feasible before I continued designing more components for robots with more functionalities....
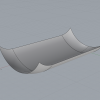
With the goal of designing and creating my own elastic geodesic grids, I prepared some 3D surfaces in Rhino that I wish to approximate with a grid structure. I first started with making a dome shape. It is simple and basic, but helped teach me how to make some other designs. For example, I d...

My last few blog posts have been about bringing up example boards designed in our HDL, especially ones incorporating the new features of port arrays and multipack devices. Some of them were more toy examples and intended as proofs-of-concepts (like the LED matrix), while others were more practical...

Using the interactice roco compiler I was able to design a canoe of the following dimensions: boat.depth: 20.00 mm boat.length: 100.00 mm boat.width: 50.00 mm bow.point: 50.00 mm seats: 1 stern.point: 50.00 The goal of this was to design a boat which could then be possibly used with the grassho...