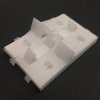
The third version of Mechanical logic was created (shown as below) and the comparision with version II was conducted. Given the stability of the structure, we will first use Version II as start point to combine the SCP actuators to verify the functionality. However, the version III has much high pos...
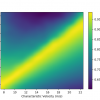
While progress on implementing the machine learning for the controller continues, I thought I would an update on the new FOM (figures of merit) for the autonomous controllers, which are used to evaluate the ability of the autonomous controller to reduce traffic. The new figures are the result of sev...
Last week, I designed the third version of mechanical logic. This third version used different kind of mechanism for forming bistable beam. The 2D pattern design is attached below. The biggest advantage of this design is less complexity for assembly thought the design itself is much complicated. And...
New tabbed RoCo Interface Hi all, its been a while, This past summer, I did an internship at Symantec, where I worked on creating a Linux testing framework for a malware detection application. My framework ran performance tests on the program and analyzed the data to extract information about th...

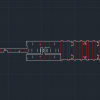
An example of tabs in a 2D geometric unfolding This quarter, my main goals are finishing up my research with RoCo (Robot Compiler), and planning and starting a new research project in a new area. After working on RoCo for the past year, the project has grown considerably, and new team members wi...
This week I worked on fixing and documenting bugs in RoCo to prepare it for an upcoming handover to a new team. I will be moving on to a new project later this quarter so in addition to working on RoCo, I performed a literature search for the current state of the art of reinforcement learning and le...
I primiarily did paper survey on the papers following Diffusion Kalman Filter, in order to characterize its performance in the persecptive of network topology. On the way of surveying, I found that there are two main research groups in this field. The first on is lead by Dr. José M. F. Moura. One...

Last week, I added more features into our mechanical logic II design. First of all, stiffening edges are employeed to increase the stiffness of the whole structure. Also, this feature somehow improved our mechanical logic's stability. Then a ventral frame was created to boost its stability and flatn...

We have a new machine in our lab! It is a laser cutter, which can be employed in both carving and cutting works. This laser engraver is equipped with one 40W water cooling laser tube, high precise stepping motors, high quality control board. It employs an USB port and thus can be connected to your l...
Research on how to measure/estimate reaction torque In addition to thrust force, a spinning propeller will also introduce reaction torque onto system. According to paper [1], there is a strong linear relationship between a propeller’s reaction torque and thrust force. Once this relationship is fou...