For the next week, I will spend most of my time on preparing the manuscript for RoboSoft conference. The manuscript is about crawling origami robots that use a printable oscillator as a simple embedded controller and actuator. The deadline is Oct. 25th, I will finish the first draft by Oct. 16th and...
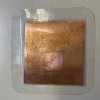
Last week, we got new machines for battery fabrication. Now we can created more delicate batteries, as shown in the attached figure. The voltage is about 1 V. However, the current methods can not guarantee the close contact between electrodes and filter paper, which caused extremely lagger resistanc...
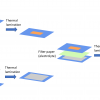
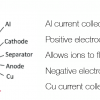
The basic fabrication porocess of the proposed printable battery is shown as the figure. We need to firstly combine the electrodes (Zinc or copper file with pouch sheet), which is completed by thermal lamination, resulting in composite electrodes. It is wotrhting noting that we need to cut a hole on...

I just got the thermal camera, Fluke TIX580. This camera is very powerful and can be used to capture thermal images and videos in a very high resolution. In case you want to llearn more, I also include the manual of the camera below. https://www.instrumart.com/assets/Tix500-series-manual.pdf
How to customize batteries according to your requirements? It is very challenging to design a battery to satisfy specific loading. For example, you may need to have a battery that can outup certain current when connected to an electric-driven actuator with a certain resistance. Similarly, for our pr...
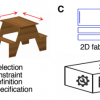
For the past week, I mainly focused on paper writing. Firstly, I worked with Chang to revise the paper, titled 'Computational Design and Fabrication of Corrugated Mechanismsfrom Behavioral Specifications'. We plan to submit the paper to IROS with RAL option. On the other hand, I am revising...

The basic fabrication of a printable battery includes electode formation and battery packaging. Here I use a Li-ion battery as an example. The first step is the electode fabrication, which includes slurry preparation, coating, cutting of electrode, electrode calendaring, electrode slitting, and t...
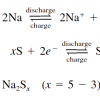
For our printable robots, we are planning to integrate printed battery as on-baord power. Currently, we choose Na-ion battery given the relative high voltage, low resistance, low cost, and high drain current, etc. There are two main types of Na-ion battery, i.e. sodium/sulfur battery and sodium/meta...
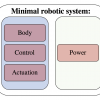
So far, I have been able to create functional printable robots. However, the printable robots are still tethered to off-board power, which limits their potential. Recently, I am working on designing autonomous robots by integrating printed battery into our printable manufacturing paradigm. For the n...
For the past week, I mainly worked on the paper revision for the manuscript entitled "Fabrication-aware Design for Furniture with Planar Pieces". This paper was submitted to Robotica and required a major revision. It is very close to finish the revision. I wil add more modifications after receiving...