
Last week, the SCP actuators were assembled into mechanical logic frame and tested. There are some challenges still needed to be solved to get the mechanical logic function. The first main issue is the contact betweeen SCP actuator and conductive tab. A much more reliable method should be proposed....
The third version of Mechanical logic was created (shown as below) and the comparision with version II was conducted. Given the stability of the structure, we will first use Version II as start point to combine the SCP actuators to verify the functionality. However, the version III has much high pos...
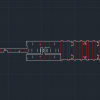
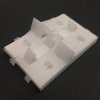
Last week, I designed the third version of mechanical logic. This third version used different kind of mechanism for forming bistable beam. The 2D pattern design is attached below. The biggest advantage of this design is less complexity for assembly thought the design itself is much complicated. And...

Last week, I added more features into our mechanical logic II design. First of all, stiffening edges are employeed to increase the stiffness of the whole structure. Also, this feature somehow improved our mechanical logic's stability. Then a ventral frame was created to boost its stability and flatn...

We have a new machine in our lab! It is a laser cutter, which can be employed in both carving and cutting works. This laser engraver is equipped with one 40W water cooling laser tube, high precise stepping motors, high quality control board. It employs an USB port and thus can be connected to your l...
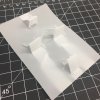
This week, the new design of mechanical logic was created and prototyped. The new mechanical logic employs bistable beam structure to function as switch. In this manner, the reliability and assemblability of the structure are greatly improved. By the way, it just needs 20 mins to finish the assemble...

The goal for the project of 'Antonomous printable robot' is to create a printable antonomous paper robot, which is only made of power source(e.g. battery), paper and conductive thread. The biggest challenge is to control locomotion of robot without computer chips. The proposed solution is to design...