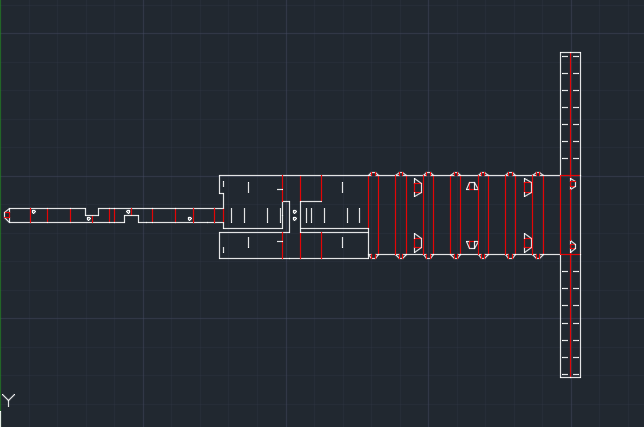
Last week, I designed the third version of mechanical logic. This third version used different kind of mechanism for forming bistable beam. The 2D pattern design is attached below. The biggest advantage of this design is less complexity for assembly thought the design itself is much complicated. And the result turned out to be not functioning well. This week, I will continue to improve the third version design. Further, I will decide the final choice for autonomous printable robot and start to add electronic components to see if the mechanical logic works well.
On the other hand, I dived into learning RoCo system for past week. I looked into "add.subcomponent()" function and felt much comfortable with Python programming. I will continue to learning RoCo system and try to figure out how to add "add_connection_fingerjoint()" to RoCo system.