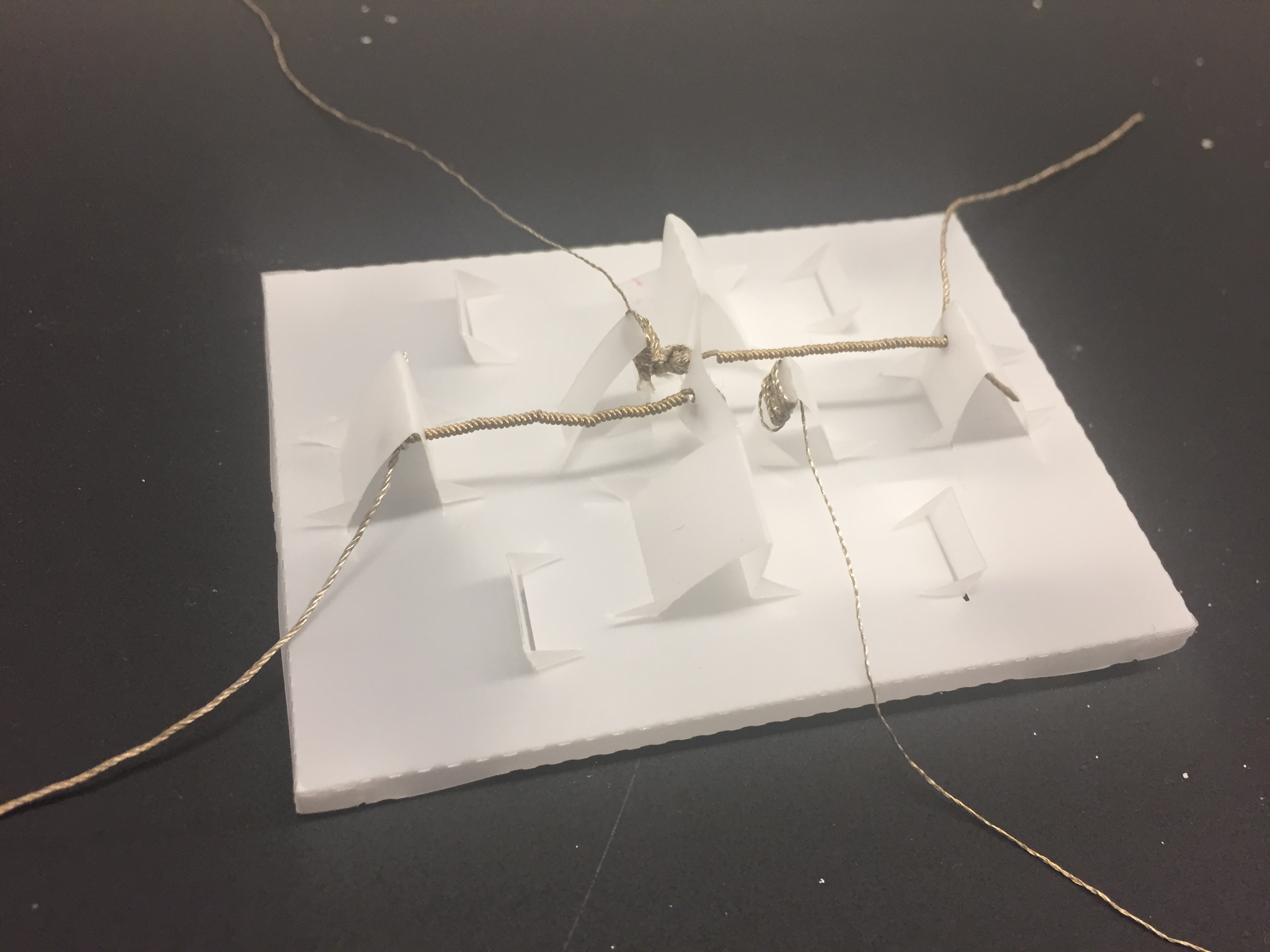
Last week, the SCP actuators were assembled into mechanical logic frame and tested. There are some challenges still needed to be solved to get the mechanical logic function. The first main issue is the contact betweeen SCP actuator and conductive tab. A much more reliable method should be proposed. Also the uncoiling an the both ends of SCP actuator is hard to avoid now. The potential solution will be using another conductive thread to tie a node at the end of SCP actuator. For this week, much more time will be spent on those existing issues in order to finally have a mechanical logic oscillating back and forth.
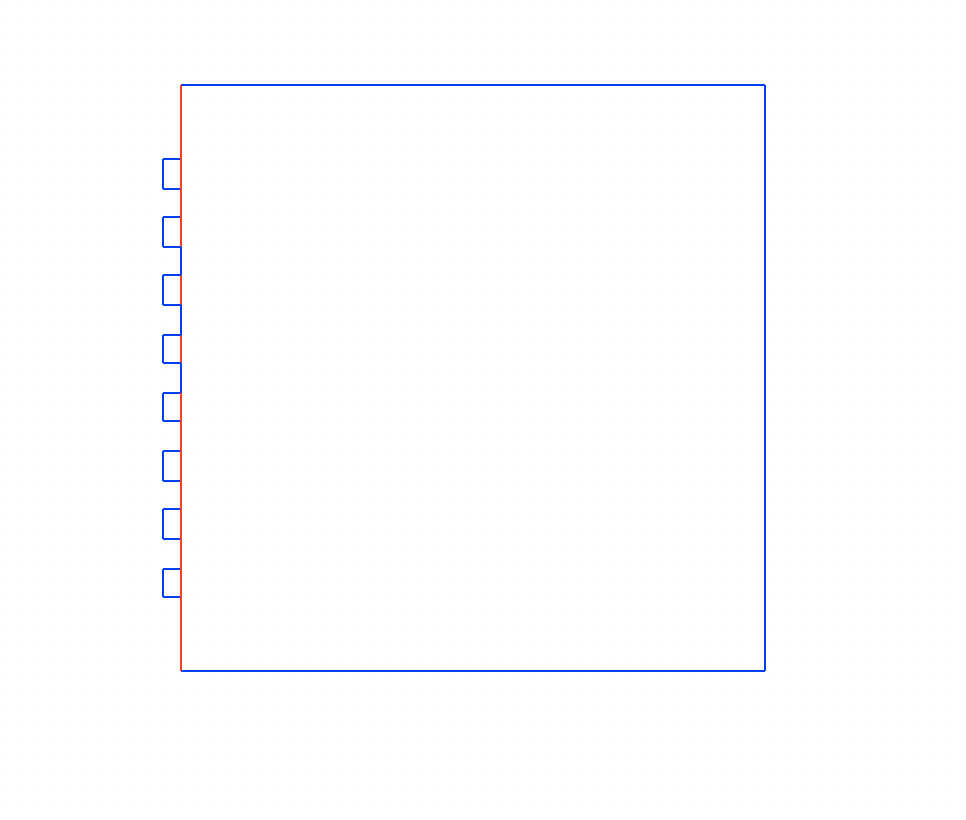
On the other hand, I added 'finger_jointify()' function into RoCo system to enable to automatically generate finger joint on subcomponents. This function can also decide how many fingers needed according to the size of subcomponent. For the next step, this function will be blended into our existing 'tabify' system to improve the systematicness and integrality of RoCo.