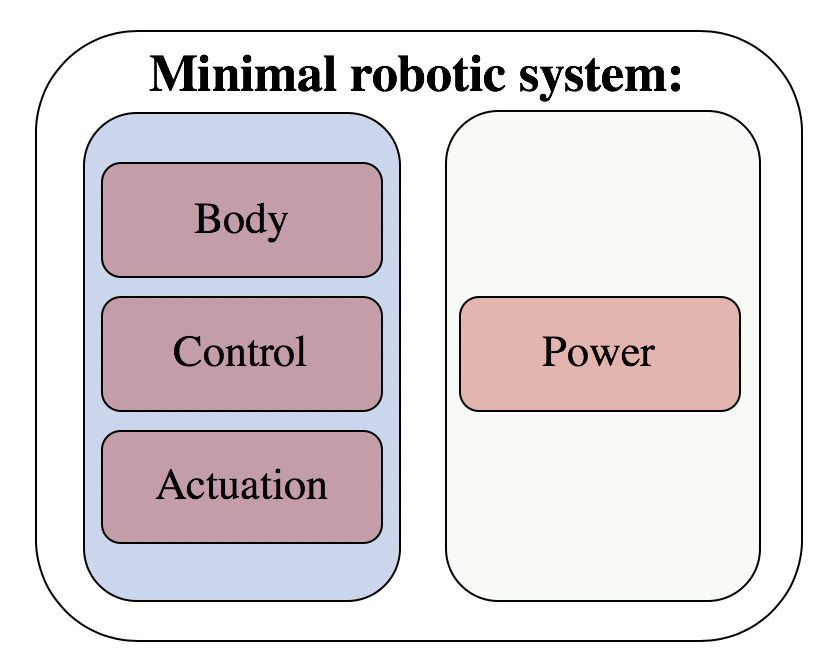
So far, I have been able to create functional printable robots. However, the printable robots are still tethered to off-board power, which limits their potential. Recently, I am working on designing autonomous robots by integrating printed battery into our printable manufacturing paradigm. For the next week, I will focus on finalizing the robot design with specific locomotion and thus the requirements on the on-board prented battery.
So far, I have been able to create functional printable robots. However, the printable robots are still tethered to off-board power, which limits their potential. Recently, I am working on designing autonomous robots by integrating printed battery into our printable manufacturing paradigm. For the next week, I will focus on finalizing the robot design with specific locomotion and thus the requirements on the on-board prented battery.