
Big picture The deficiency of the current derivation is marked red color, which would be extended in the next week.
This week, we assembled the prototype blimp in the lab. Siyou played around with it. This prototype blimp requires some skills to manually control it.
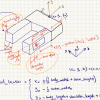
Trying to get actuation location from RoCo. Method 1: Write a new code for it Steps: Get motor information from .yaml file (e.g. "fs90r") Refer to dimensions.py for motor geometry information (e.g. "hornlength" etc) Refers to system input for "length", "width" and "height" for "bodylen...

Here is what we will need to extract from RoCo in order to construct simulation in Webots Updates In the above graph, green boxes have been implemented in RoCo. Now, for each component, we can extract vertices coordinate, facet normal, and coordinate index from RoCo. Example 1: for compone...
The lab 3D scan using LIDAR camera and the point cloud is shown in the following video:
Recently, I'm preparing the prelim topic regarding machine learning and algorithms. Here are some lecture notes that I found on-line: Machine learning https://www.u-aizu.ac.jp/~qf-zhao/TEACHING/ML/ML.html http://web.cs.ucla.edu/~sriram/courses/cm146.winter-2019/html/index.html Algorithms...

Updates: RoCo can save components separately, in .stl files Coordinate can be saved in .wbt required format in .txt files Facet normal can be saved in .wbt required format in .txt files Details Coordinate points of each component have been saved. Example: RoCo-Saved-Coord (left)...
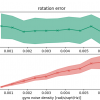
The optimization based SLAM formulate the optimization problem with two kinds of constraints. First, the pre-integrated IMU error establishes the constraints between two spatial states, or two poses. The other one is the reprojection error that links a spatial state and a landmark. In the optimizati...
I have been thinking a bit on what consensus on a quantum network means and whether the solution for von Mises-Fisher consensus has any good application towards quantum information theory. There are 4 ways to define Consensus on a quantum network (Mazzarella, et al. 2015): Sigma Expectation Con...
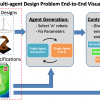
"LOGiCS is a project funded by the DARPA program on Symbiotic Design of Cyber-Physical Systems. The aim of the project is to develop design tools and techniques that augment human designers with an AI co-designer towards achieving significant improvements in design productivity as well as design 'su...