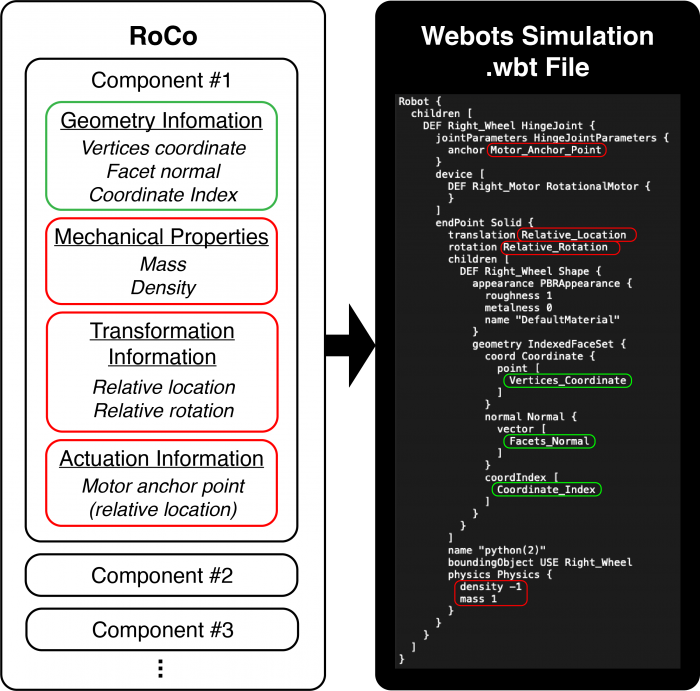
Here is what we will need to extract from RoCo in order to construct simulation in Webots
Updates
In the above graph, green boxes have been implemented in RoCo.
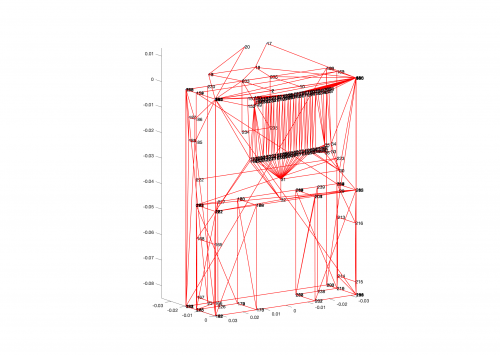
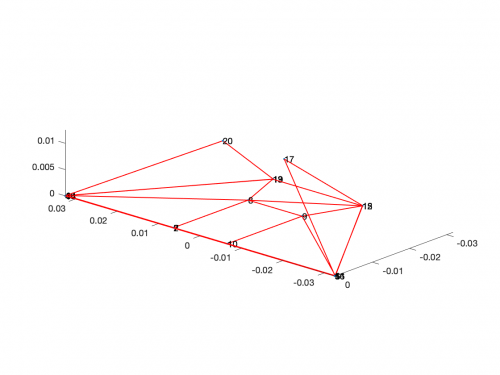
Now, for each component, we can extract vertices coordinate, facet normal, and coordinate index from RoCo.
Example 1: for components with only one face
Here is an example to check we can correctly represent a component using the information we extracted from RoCo, by showing we can correctly triangulate a wheel:
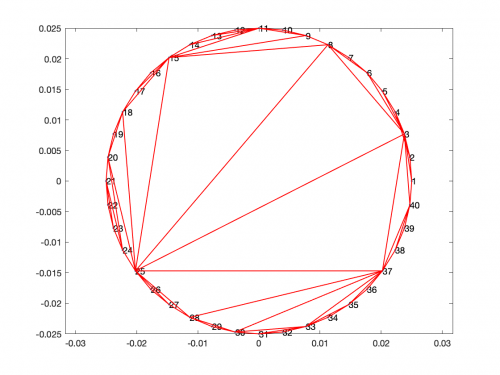
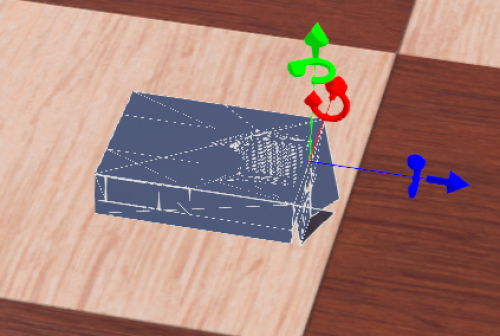
By inputting the information (vertices coordinate, facet normal, and coordinate index) manually (for now, this will be done within RoCo later when we have all information), this is what we get from Webots:
 Glad this works!
Glad this works!
Example 2: for components with more than one face, tail
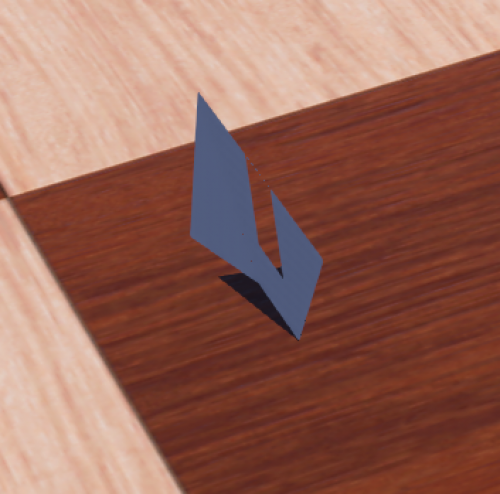
Example 3: more complicated example, body+tail