
A python library dsnwritier was created to help users to do electrical design from python script. It contains simple functions to call to import drawing files (dxf/svg), to load footprint based on kicad_mod file, and to define netlist easily. Package Dependencies: pykicad numpy C...
We finished making the 3D boat structure in RoCo. It isn’t perfect because we temporarily hard coded the angles between the faces, but is good enough for the demonstration tomorrow. When we complete the rest of the boat we will go back to the boat structure and figure out the angles to widen the var...

For the paddlewheels, we have implemented the correct 2D template in RoCo, but we're still working on the correct construction for the 3D model. Currently the two sides of the wheel are oriented flat face to flat face, instead of flap to flap as desired. We also need to code in tabs to connect t...
Overall, I am having quite a positive experience at LEMUR. The aspect of this lab that most prominently grabs my attention is how willing lab members are to help each other. The person outside of my team who has helped the most, directly and indirectly, with the project is Amir. At nearly every step...

Throughout the past week, I was able to write my first code that merely uses I2C calls to initialized and read of the VL53L1X sensor. The code mimics the exact send/receive byte sequences which were captured by the ST’s library in the past week. Currently, I’m capturing the same sequences of dat...

Calibration is essential for optical motion capture systems. During camera calibration, the system computes position and orientation of each camera and amounts of distortions in captured images. Using calibration data, Motive constructs a 3D capture volume. This video illustrates how to calibrat on...

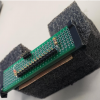
A Python package was developed to help users with importing DXF drawing to KiCAD PCBnew. The package reads a dxf file and draw everything in PCBnew board design file. Supports layer , width parameters Supports line, ploygons class for now Will develop for Arc, Circle and Text...
While trying to create a way for realiable electrical connections using copper coated paper I considered the idea of a 'customizable breadboard’. This system would be designed so components are placed through holes like a breadboard but instead of using wires and standardized internal connections to...
This week we began writing the RoCo code to make the 2D and 3D structures of our boat. So far, we have made one fourth of the boat structure but it isn’t completely correct. The edges of the triangles that make up the bow don’t line up correctly as seen in the 3D model. We think this is due to round...

During the past week, we finalized the boat structure and began modelling the chassis in RoCo. Boat 10 was an attempt to make a faster boat by reducing drag. We flipped the battery and ESP8266 board on their sides and made the chassis narrow and long. However, when we tested it, the uneven weight di...