This week I spent a lot of time fixing stability bugs with the ORCAS system and gathering data with the reinforcement learning system. With a learning system, stability is extremely important as learning can takes days or even weeks which means that any small issue can completely bring down the whol...

For last week, I created flexible joint for furniture design to expand the design space. This flexible joint can allow two faces join togrther with certain angle while the finger joint only works well for 90 degree. But currently, our system has limited choices for one furniture design, which means...
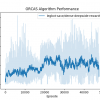
This week the ORCAS team finished the communication layer between Gazebo and the reinforcement learning algorithm. With this, we were able to start training robots. We created a parameterized four legged robot and starting training a dense neural network (DNN) controller for it. Video In this sim...
This week, the ORCAS team set finished setting up our learning environment and began running the first tests. To do this, we first needed to create a parameterized robot design that we could use in our simulations. Our initial plan was to use a two wheeled robot as the robot for which we would opt...

In order to get a live ground truth reading of the location of an agent we need to utilize sensors. We chose to use OpenCV to detect the color of the robot. So fatr the results have been good with just a solid color however the model struggles to identify a multicolored robot. It was thought that mu...
This week, me and Prathyush worked on implementing the algorithms we discussed in our blog posts from last week (here and here). So far we have our baseline algorithm from previous research implemented and are in the process of implementing our proposed algorithm. The two main components of the...
For the last two weeks, I summarized the work of Mechanical logic and finished the draft of paper for upcoming ISER. The model for mechanical logic is needed and is the main focus for the following several weeks. I will build a model to help to predict the behavior of mechanical logic and guide the...
The original design for the API that interfaced with Gazebo and the PGPE algorithm was in the form of multiple function calls. After looking into the way that gazebo and it's plugins functioned, we decided that creating individual functions would not be possible. Gazebo operates its plugins using a...
The RoCo team is planning to submit two papers with deadlines in early April. The plan is to submit a paper on an interface for the co-design of mechanical and electro-functional structures to UIST 2018 and a paper on a unified design environment for multiple fabrication output forms for SCF 2018...
Over the past week we have been trying to send the position data to the vision package running on a virtual machine. However, we have found out that the Kinect detector fails to send the json file via ZMQ.The problem might be that ZMQ binds to the wrong network socket.