
In order to get a live ground truth reading of the location of an agent we need to utilize sensors. We chose to use OpenCV to detect the color of the robot. So fatr the results have been good with just a solid color however the model struggles to identify a multicolored robot. It was thought that mu...
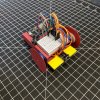
Over the past week I have been working on assembling a hardware implementation of a robotic localization system. The robot itself is the LEMUR paperbot or segbot that runs on two wheels with its tail dragging behind for stability. The robot has three external sensors, 2 range finding Lidars and one...
After struggling with the mathematical formulation of the problem for what has been a long time now, it is finally in a state where it can be converted into code. The importance of not overlooking the accuracy of the math cannot be understated since this uniquely defines the code. Whilst performing...
In research it is important to have a clear understanding of the problem formulation before looking for a solution. Up until this point the lidar localization problem has not been well defined and this has lead to misaligned interpretations of the research direction. Part of my time this week was...
Last week I gave an update regarding the progress that I had made with the literature review that I had been conducting into range only localization techniques. The issue with this line of investigation was that it was slightly off topic since we are trying to solve the issue of not having rotation...
Over the course of the quarter I have been conducting a literature review on localization techniques that can be used for the lidar localization investigation. Progress in this area was slow at first was it was difficult to differentiate between the myriad of localization algorithms given different...
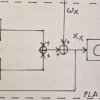
Over the past week I have been reformulating the Kalman filter implementation by given it a more formal representation such that the system can be fully understand and built upon. The image below shows the block diagram of the system from the highest level: The plant model is assumed to be kno...
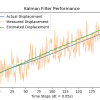
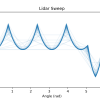
Over the past week I have been researching how to implement a kalman filter into the Lidar localization system. As a reminder the goal of this project is to investigate whether it is possible to drop the angular velocity measurement of the Lidar as it completes a sweep of the room and still maintain...
The research question that this investigation seeks to answer is whether its possible to localize a drone in two dimensional space using a one dimensional LIDAR or range finder. The investigation has two main aspects; hardware development and integration, and software and simulation. The progress in...

Research into the use of MEMS actuators with malleable robots has moved along at a steady pace this quarter. Initial investigations started with an in depth look at straight line linkage systems that could be incorporated into the design.The straight line constraint is important due to the fact that...