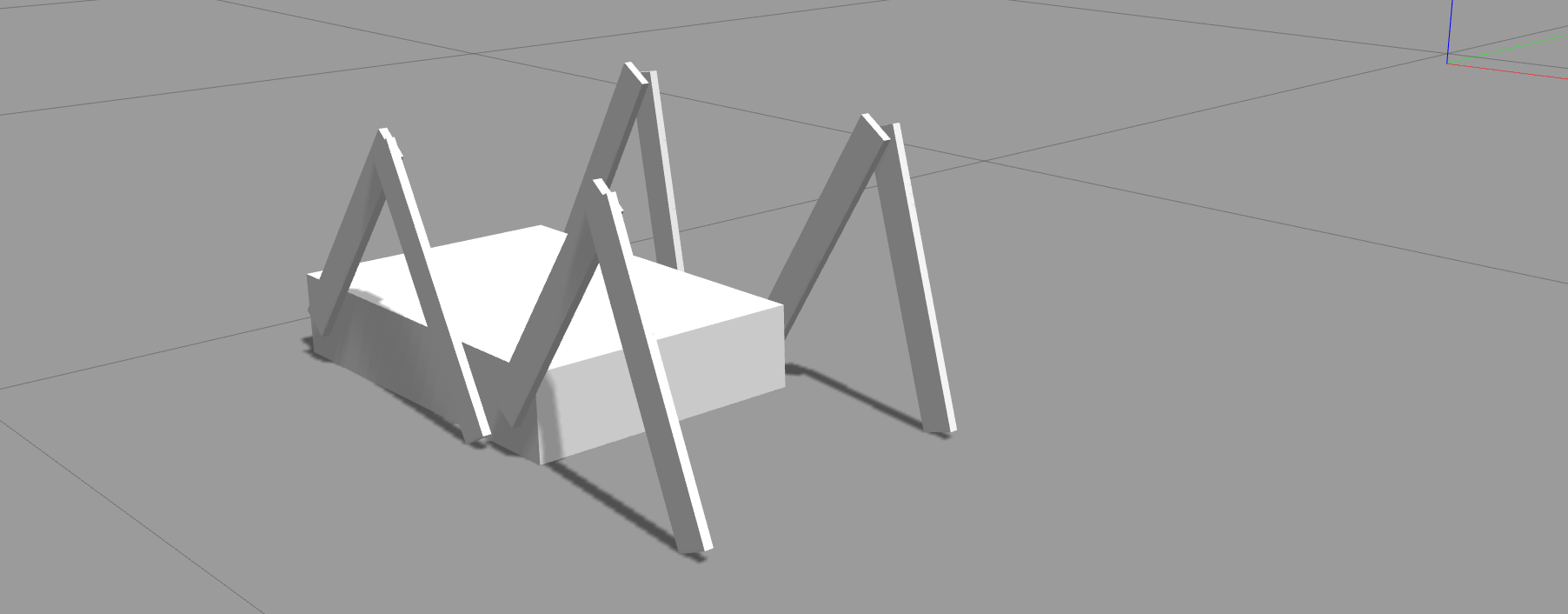
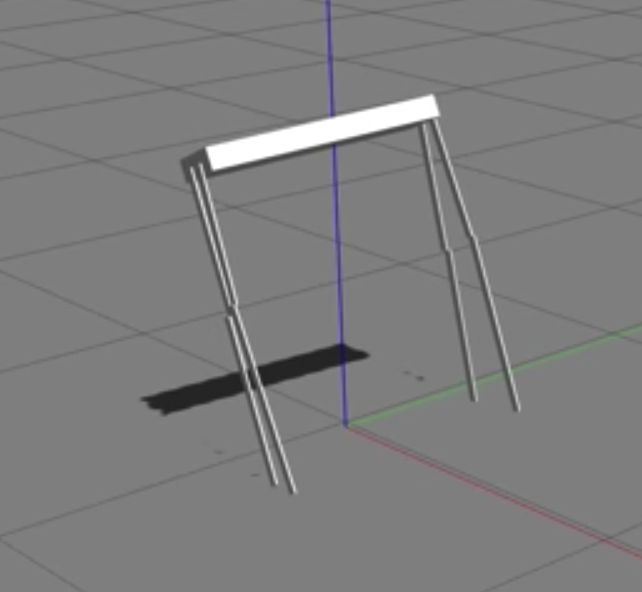
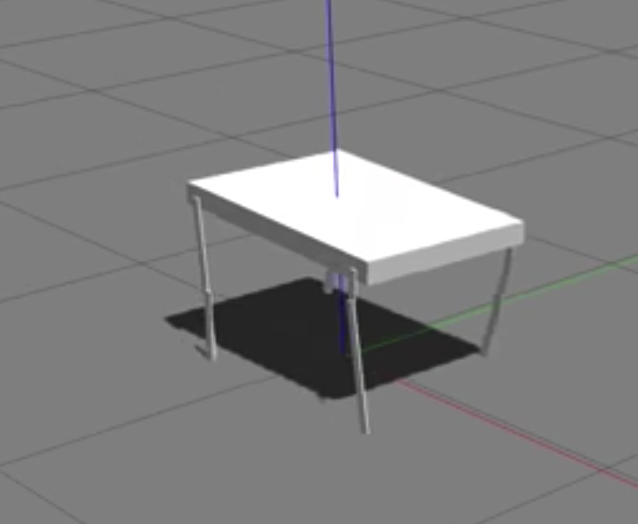
This week, the ORCAS team set finished setting up our learning environment and began running the first tests. To do this, we first needed to create a parameterized robot design that we could use in our simulations. Our initial plan was to use a two wheeled robot as the robot for which we would optimize the control and structure, be we were concerned whether the geometry of that robot would be conducive to optimization, as we felt that changes in the geometry parameters were unlikely to have a large effect on the optimal control for the design. Because of this, I built a simple four-legged robot, as seen in the images above. The robot design itself was created in the parameterized sdf format that we created, with 6 geometric parameters, and 8 controller inputs. Our algorithm is able to change the length and width of the body, as well as the lenght of the two links in each of the legs. The front legs are constrained to have the same dimensions for the right and left, as are the back legs. The controller inputs are the rotation of the 8 joints in the legs, two for each leg.