LOGiCs_presentation.pdf

After the post-mortem from the previous competition, we started by identifying the small problems that we had to fix before integrating the whole system. There were multiple issues being handled both from the hardware and the software perspectives. First, the main chassis that will hold the micro...
Color threshold + web cam: Video size: 800 * 500 ML model + web cam: Video size: 400 * 250 The reason why this is slow most of the reasons are because this section takes too long to run: # take too long this step for i in range(h): for j in range(w):...

ESP32 Cam Range check This week we tested the Wi-Fi connectivity range of ESP32 cam with and without antenna. ESP32 Cam with Antenna: We were able to achieve a range of 130ft. When it reached 130ft it had slow response time. ESP32 cam without Antenna: We were only able to achieve a range...

This improvement is based on the previous posts, corresponding to the first step: Step 1: Deal with information problem: using only closest neighborhood information. Code is here The main improvent is to set the observation field. Current mean-field assumes all agents' information are av...

Hi everyone! I'm a new postdoc with LEMUR, and I'll be working on modern tools for circuit board level electronics design. So that's a lot of words, let's unpack that. Modern board design tools (like KiCad) consist of schematic capture (drawing the schematic) followed by layout (placing components...

This week, we started to get all the new members know how to build a blimp from sketch. Next week, we will be working on the altitude control using ultrasonic sensor. Meanwhile, some ideas that we are thinking about: (1) Modify the propulsion system, use only 1 motors at the side of blimp...

Paper Target: IROS 2022 Current open source mean-field reinforcement learning code, which is based on MAgent Blue: Group 1 (Proposed Algorithm)Red: Group 2 (Opponent) Algorihtm Information Collision Task Current using all agents as neighborhood One state (position) only...
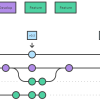
Problems that I've been thinking about: How can collaborative code development be more efficient? How do avoid conflict when multiple people are developing? How make the code more readable, easy to maintain and debug? A successful Git branching model: (Simplified version) A example...
A quantum Kalman filter is a recursive Bayesian filter used to predict and estimate the state of a quantum system, and was first introduced by Viacheslav Belavkin. It is described in his work (Belavkin, 1999). Another interesting work is the quantum extended Kalman filter. However, much of the r...