
We figured out a new way of doing image detection. In this way, we should be able to use the computational power of laptop to detect objects using trained machine learning algorithm. Here is the overall flowchart: We tested the RF communication part in the lab: It works exceedingly bette...

Simulation playground decoration progress: We attached April tag with the square hoop and hang them at the ceiling. Since there is a strong wind coming out of the wind tunnel on the simulation room, we used a plate to block the wind tunnel. (Effect see demo 1:) Demo 1: Strong wind disturbance...

Simulation room decoration: We hang the net at the ceiling We tested the floor lamp in the simulated space We implemented the April Tag recognition there. Video is from yesterday:
Demo: Blimp recognize and move toward an April tag [x] Camera is capable of identifying the April tags below the goal [x] Blimp is capable of moving toward an identified goal [x] Test the range and performance of this capability [ ] Blimp can conduct rotation and vertical motion using the Ap...
For the last few days, we have been working on two problems: the ball possession problem and the ML-based ball detection algorithm. Ball Possession At first, we attempted to detect the possession of the ball in the basket using IR sensors. However, both the sensors we had gave a very small range...
I have been look up for programs in NSF that our lab can possibly submit to. Before starting, NSF listed 10 big ideas that guide the research direction! program link The Emerging Frontiers in Research and Innovation (EFRI) program https://beta.nsf.gov/funding/opportunities/emerging-front...
Blimp can seek, recognize, move toward and capture a green ball using color detection (the new blimp setup:with camera on the nose of the blimp) (demo) Modify and improve our current design (lightweight gondola, control board and camera at the new position) Test the algorithm on the new bl...
Demo: Blimp can recognize and move toward a green ball using color detection(the current blimp setup) Blimp is capable of seeking the ball by rotating itself Blimp is capable of moving toward an identified green ball Blimp is trying to capture the green ball using the capture basket Under...
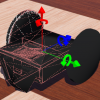
New Capabilities: Robot Compiler, RoCo is a sophisticated origam robot generator that a user can define how to cut and fold paper, and change design parameters with ease. I have been working on to export roco generated robot designs into physics simulation software, Webots, so that the user can fu...
