
Unit cells were presented last week in the form of a table. As previoulsly described, auxetic cells can be repeated and connected to one another to form repeating patterns which can then be actuated to form different kinds of curved surfaces. The goal of this week was to make use of the unit cells a...
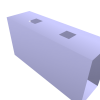
This week I spent a lot of time familiarizing myself with making cutouts in RoCo which was quite difficult compared to creating the components by connecting faces, edges, and tabs. Creating cutouts and knowing how to position them in RoCo is particularly important and relevant to my project because...
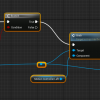
This week I worked on debugging some of the movement issues from the previous week. I also worked on the grabbing aspects of objects as I wanted to remove the physics of objects and allow these objects to interact with each other. I demonstrated the object's grabbable aspect by placing an object tha...

This week, I worked on the fabrication of an elastic geodesic grid. I started with these plans in a PDF format. Then I had to convert the PDF file into a readable DXF file to open it in Inkscape. I resized the the plans to fit a 12" x 24" space and adjusted each pin hole/slot to be able to fi...

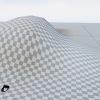
This week I have been reading up on literature regarding auxetic unit cells. This week I decided to rechange my focus to looking at different unit cells because after last week when I made the auxetic structure I realized that the auxetic cells do not behave the way that is shown in a simulation. I...
This week I created movement functionality from scratch, although was not able to test this fully. I had also used Unreal's grabbable object meshes to help test the controller (although this was not fully tested either). What I was able to test was the object physics of the grabbable object with...

This past week, I focused on designing more modular components to add to Roco as well as programming motors using the Arduino microcontroller to familiarize and simulate different types of motion. I was able to understand Roco much better through the process of designing these new components; specif...

This past week I used Rhino 7 to create .dxf files that can be used with the laser cutter and paper cutter (the CAMEOS). Designs were made within in the Rhino software and were manufactured using Vinyl Polyester as the material. (The plastic roll of material in the lab). Before making a structure...
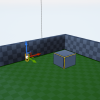
The current project that is being worked on is building off of the RoboGrammar, a graph heuristic search. Rather than a user needing to input a prebuilt terrain, a user may be able to use simple interactions to design an environment such as the width and length of a hill. This week my overall goal...

These past weeks, I've been experimenting with Interactive Robogami which is an end-to-end design system for ground locomotion robots. It greatly simplifies the design for cut and fold robots, has a library of modular components to choose from, and has many performance and fabrication metrics includ...