The problem that was encountered last week was that the two wheeled paperbot was not able to support the weight of the phone. This week I worked on creating a four wheeled bot that could maybe have a better change at carrying a phone around. I modified the cutout to accomodate two more servos and th...
Throughout this week, I have discussed with other members of Roco team about how to improve the current interface. Ultimately, we agree that we should eliminate the current “right column”, which is currently the main interface to input new parameters of components and subcomponents. Such an interfac...
Christian, Prathyush, and I came up with a rough plan on how to proceed with our new research and some goals/questions to address for this quarter. It can be found below: Parameterized robot specification What parameters are required to fully specify a robot? Create a composable that can export...
Last week, I identified that the source of many problems for the composite component interface was the manual serilization of the Blockly workspace. In an effor to rectify this, I spent this week designing and implementing a JSON framework to handle the serialization and deserialization for us. A...
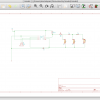
As part of generating an interface that automatically generates traces for pins connections depending on the user's desire, this past week I focused on learning KiCAD. This open source helps you create a schematic that can then be turned into a PCB layout. I decided to get familiar on how to use it...
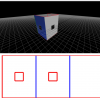
A component in the interface with cutouts added This week I spent trying to fix the issues that I have been working on the past couple of weeks. After spending a considerable time reading documentation and trying out different things in the code, I was able to make the cutouts appear in the 3D vie...
This week Karla and I started doing our pre-lab for an experiment we are going to be running. The experiment will involve analyzing the aluminum coated plastic in order to determine the measured resistivity. Using this resistivity value we can determine its conductivity. Our approach will involve...

For the last two weeks I've been working on implementing Hoeken's linkage out of paper. Hoeken's linkage is a four bar mechanism that converts rotational motion to approximate straight line motion. The diagram is shown below: The length of these arms follow a certain propotion shown in the diagra...

Finally, I made the mechanical logic works for several times though just single side of it. This is a great progress towards final goal. During past week, the uncoiling issue was eliminated by adjusting the annealing temperature and using thinner thread to form a mechanical stop. On the other hand,...
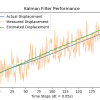
Over the past week I have been researching how to implement a kalman filter into the Lidar localization system. As a reminder the goal of this project is to investigate whether it is possible to drop the angular velocity measurement of the Lidar as it completes a sweep of the room and still maintain...