I used 13 maps as the testing maps and implemented my algorithm, parameters of these maps: map name size initial point coordinate goal point coordinate duty cycles warran 1108 * 1301 (740,297) (430,1013) 0.347 map 1 500 * 500 (10,10) (490,490) 0.2444 map 2 500 * 500...

Objective: Use gesture to select an auto-generated button Generate new design object from backend compiler Implementation Steps Detect hand gesture at every frame, when current gesture is the gesture defined for creating (in our example case, gesture "point"), ready for creating. Find...
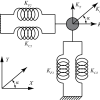
For the past few days, I have been studing the mechanical behaviors of accordion shape folded structures. I have also been studying the science of paper sheet, which is quite complicated. I have developed a mathematical model to predict the in-plane stiffness of both single-layered accordion shape f...
Motion planning is a key component for robots to realize navigation. A number of great works have been conducted in the world. They are grid-based approaches, sampling-based approaches, and trajectory optimization. I'll summarize the pros and cons of each motion planning algorithms in the future. ...

A FORAY into Lighter Than Air Vehicles How can we create blimps that can outstrip competition in agility and speed? This was the initial question our team was posed with when embarking on this project. To solve it, we began with a "project proposal" outlining what we thought was the best method...

Objective: Automatically obtain a list of available design object from backend compiler (either local or remote compiler) Correspondingly auto generate a list of buttons for generating new objects Auto obtain available design list from compiler In our previous version of the system, the av...
For the past almost two months, I were preparing for my Ph.D qualifiying exam. I passed the exam this Wednesday. For this summer, I will work on creating more interesting printable mechanisms for robots towards my final goal to make robots fully printable. Stay tuned.
I did some research on different models to predict behaviors of foldable structures. The most useful (simple but sufficient) model for me to use is called "Bar-Hinge Model". It simplified foldable structures into bars and nodes. It can track the in-plane stretching and out-of-plane bending.

To utilize different resources from different computer system, expecially under the condition that now we are in quarantine, remote connection is a useful and powerful tool that could help us to remotely access other computers, like the powerful computers in our lab. In this blog, I'm going to sha...

Objective: Define a set of gestures Recognize them from hand models observed by Leapmotion Pre-defined gesture set .column { display: inline-block; width: 25%; padding: 10px; line-height: 0; } .row:after { content: ""; display: table; clear: both; } ...