During the blimp WIFI manual control experiment, I noticed some interesting phenomena. Even the following experiments are just some failure examples, I still can learn something from it. Failure experiment 1: The reason the balloon hit the wall was because human operational mistakes. When you...
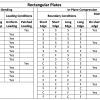
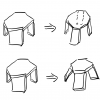
High-Level View: computational design of foldable structures Updates During the past week, I have been working on finidng numerical solutions for plate failures under different boundary conditions and loading conditions. For a plate, there are three types of boundary conditions: (1) simply...

Presentation video of our latest work, "Risk-Aware Motion Planning for a Limbed Robot with Stochastic Gripping Forces Using Nonlinear Programming", accepted for RA-L and IROS 2020, is now on YouTube! Our new motion planner is able to generate various trajectories for multi-limbed robots under sto...
Background Sub-system: human-computer interface Whole objective of the whole system: a novice user could use intuitive 3D hand gesture to express their 3D design ideas on fabrication- and environment-aware designs. Sub-objective of the sub-system: to answer to the key words...

This week I did an integrated test of blimp to achieve horizontal and vertical actuation. The gondola is shown as below: The vertical and horizontal actuation: Your browser does not support the video tag.Your browser does not support the video tag. Next step would be testing a whole integra...
Motivation – The Arduino IDE can only be used to monitor a single port. Arduino IDE does not allow multiple serial ports to be monitored simultaneously. Serial library can be used to read, write and print to different serial ports. Therefore, different ports can be monitored simultaneously from the...

To calculate the volume of helium required for neutral buoyancy based on the mass of components and blimp. Assumptions – Temperature is constant. The gas is purely helium The density of surrounding air is constant Atmospheric pressure is constant Derivations Using the equation - ...

My initial test of the different blimp envelope shapes resulted in the other balloons that I had bought not having a large enough volume of helium to support the weight of the flapping technology that is needed to enable them to traverse space. This was also true in the case that all 3 small balloon...

Recently, I have been working on testing the power consumption of motors. For this part of the experiment, I tested the HobbyPower 8520 Motors while paired with AAA batteries. This is working towards the future goal of understanding the maximum, minimum, and average flight times of given blimp syste...

Background Sub-system: The mapping between hand gesture and object geometry belongs to the sub-system "Human-computer interface". Objective of the sub-system: use intuitive gestures to design (without having to specify which parameter or geometry to change) Challenge: the system hav...