Finished the experiment of using bluetooth and wifi to remotely control two motors. Bluetooth + cellphone app: Wifi + cellphone app:
Wenzhong and I have been working on the paper named Computational Design and Fabrication of Corrugated Mechanisms from Behavioral Specifications during the past week. We have submitted the paper and fingers crossed. Special thanks to Wenzhong for his suggestions and helps. Also thanks everyone...
Experience: learned about how to debug a logical error in coding with a scientific methodology, which could be a quite valuable lesson for future debugging. 1. Bug come up The logic bug (in this example) appears when the frontend of Unity tried to parse a stl file from backend compiler, transfo...
There are several existing visual-inertial SLAM implementations. Among all, I pick okvis as our development basis. However, the okvis project is too well-written with sophisticated implementation. There are also some building problem. In summary, it is pretty hard for us to develop, especially fro...
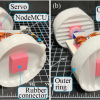
Robot Car And Paper Preparation This week, I built two fully functional wheeled robot cars as a tool to demonstrate the functionality of the corrugated structure. Figures Introduction Wheeled robot car Demo Videos Robot car with flat-plane wheels Robot car with corrugated wheels R...

Objective: Find a way to map 3D gesture geometry to 3D object geometry Find a set of parameter to represent 3D geometry for the mapping The reason to use parameters to represent, pass and map 3D geometries: The number of parameters is limited (compare to i.e. vertex number, mesh number, et...
Sampling-based motion planning approaches, such as Probabilistic RoadMap Method (PRM) and Rapidly-exploring Random Trees (RRT) , avoid the discretization problems of graph-based algorithms by randomly sampling the continuous domain. This scales more effectively to high-dimensional problems, but make...
For my latest work, I heavily used CasADi to formulate the stochastic nonlinear optimization problem. Here, I'd like to illustrate several preliminaries and tips that hopefully may be useful for others. CasADi is an open-source wrapper mainly for nonlinear programmings (NLPs), although you can...

This past week, I have been researching different camera modules that can be used on the blimps in the FORAY project. The main challenge when it comes to determining the best camera module for our use case is choosing one that is a light as possible without sacrificing performance capability in term...

Simulink Model I worked on the Coriolis force module in the Simulink model. I wrote the MATLAB function that calculates the Coriolis matrix. With the completion of this module, the dynamic model is now complete. The next target is to complete the aerodynamic model. However, the equations we have...