Simulink Model
I worked on the Coriolis force module in the Simulink model. I wrote the MATLAB function that calculates the Coriolis matrix. With the completion of this module, the dynamic model is now complete. The next target is to complete the aerodynamic model. However, the equations we have come across in different research papers make numerous assumptions that are not appropriate for our use case. Therefore, there is a need to develop the specific equations to complete this section of our Simulink model.
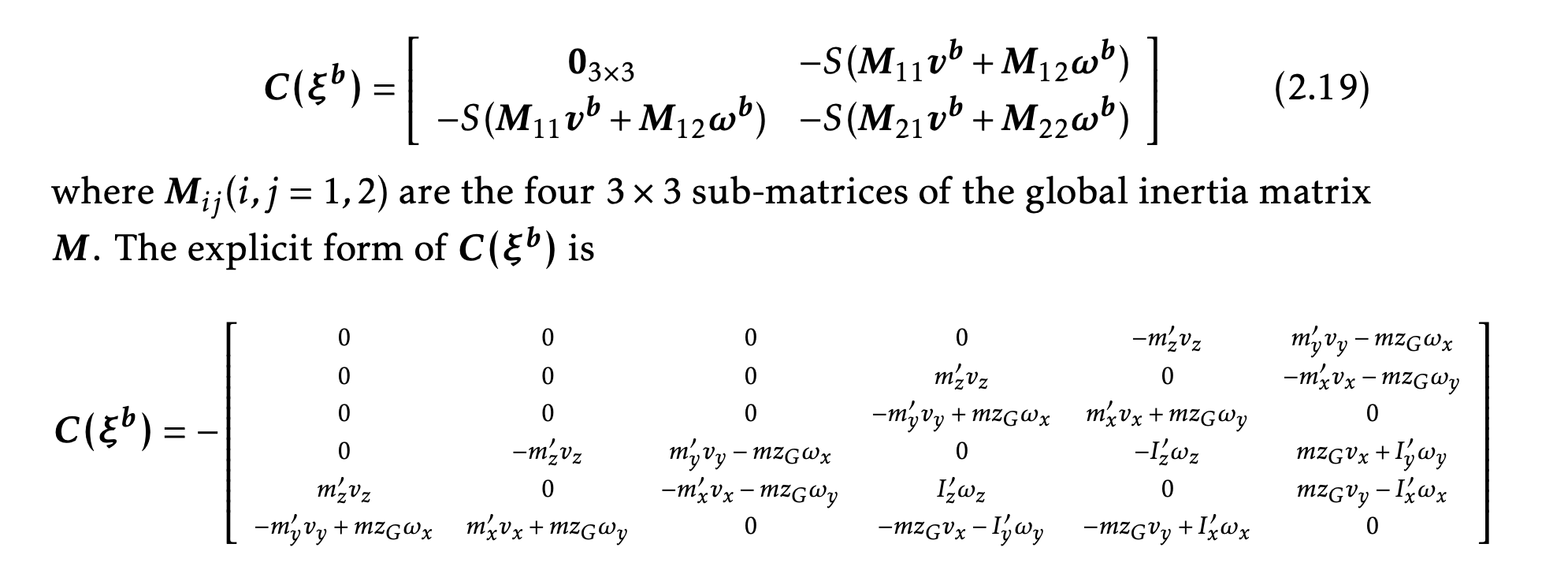
Equations used to develop the model
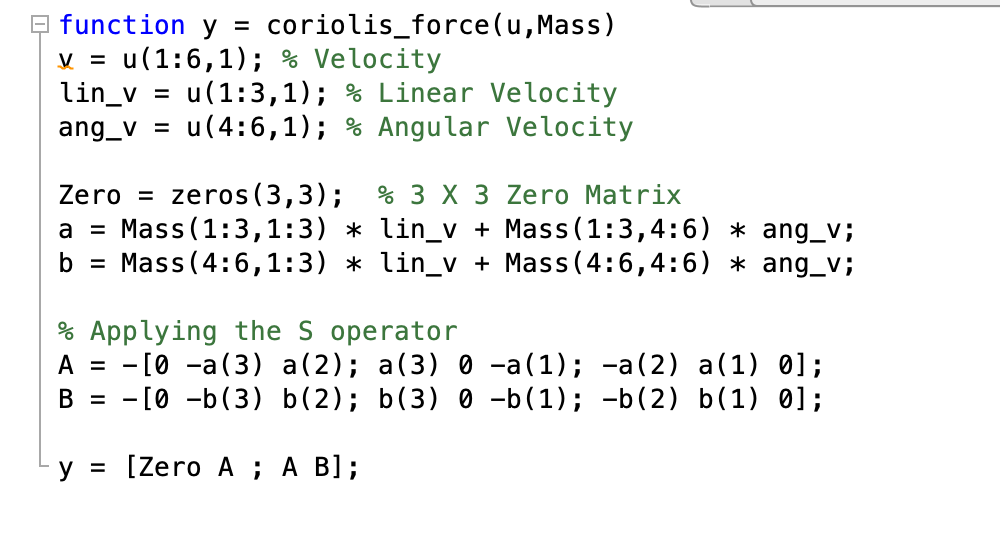
Function to calculate Coriolis Matrix. The S operator is defined on page 34 of the paper referenced below.
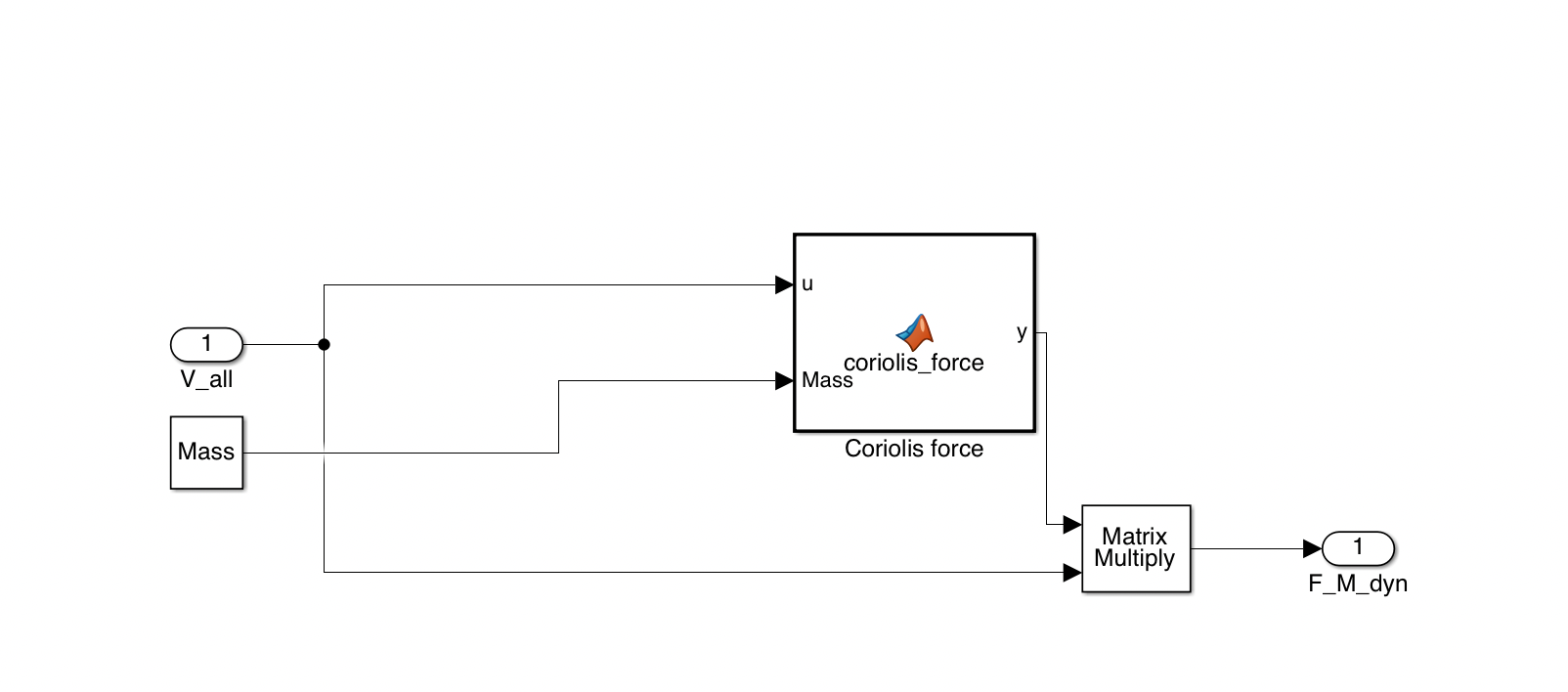
Coriolis Force Module
Battery
I also worked on hardware research. I was specifically looking into batteries. I am using the following parameters to determine appropriate battery for the blimp –
- Chemistry
- Voltage
- Capacity
- Weight
I have concluded that Lithium Polymer will be the best choice. It is lightweight, rechargeable, and has a high power to weight ratio. There are different battery chemistries that have a higher power to weight ratio. I have come across numerous research papers that have used LiPo batteries to power their blimps for over 1 hour. So LiPo batteries should be appropriate for our purpose. Further -
- Based on the operating voltage of the motor, the voltage of the battery will be appropriately chosen.
- Based on the power requirement of the entire system, the capacity of the battery will be determined.
References – Yue Wang.D ́eveloppement d’un robot dirigeable pour op ́eration interieur. PhD thesis, 2019