For this past three weeks, Wenzhong and I worked at designing and fabricating prototypes of mechancial logic. While we are facing many challenges in symmetry and fabrication time, we came up with two new prototypes. We are seeing a lot of improvement on symmetry on our new design. However, the symme...
The relation between the control coordinate frame and the body frame is still unclear. How the angular velocity of the body with respect to the inertial frame viewed by the control frame is extracted from IMU.
Blender Interface Update: For the past couple of weeks, I have been working on the electroprogrammatic interface for Blender RoCo. Here are some issues that I have encountered, some of which I have solved and others I have some ideas of how I am going to approach solving. Before the list, I would li...
The inner control loop for the single motor system is a LQR control loop, which controls only the two attitude degrees of freedom relevant to the vehicle’s translational motion. To use LQR controller, the first step is to linearlize about the hover solution, so that the system becomes a linear syste...

The Robot Compiler (RoCo) is a robotics codesign and fabrication environment to help the general public create their own robots. This image shows an assortment of programmatically-generated, parameterized polygons (left), the script used to generate the polygons (upper right), and a nonlinear system...
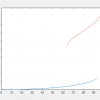
For the last two weeks, I tried out tackling the differential equation that describes the motion of the bistable beam using a reduced-order model of w(x,t), the transverse deflection of the beam. By approximating w as the combination of some functions of only x or only t, I was able to replicate the...
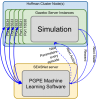
The ORCAS team has designed a parallel framework to improve training speeds for parameter optimization. So far, the parameter exploration algorithm used a single instance of Gazebo to run simulations. However, this proved to be a bottleneck since the simulation was computationally intensive and took...
CoLo is a portable simulation environment for cooperative localization that allows users to create and test estimation algorithms to compare how accurate the estimated robot locations are compared with the locations supplied by the real world data set. Over the last weeks, I worked on simulating...

The Robot Compiler (RoCo) is a robotics codesign and fabrication environment to help the general public create their own robots. This image shows a script to generate regular ngons (upper right), several programmatically-generated, regular n-gons (left), and the Robot Compiler registered as an Blend...
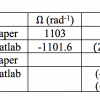
This week we have been debugging the Matlab script. We used the symbolic toolbox with a different solver and got the solution that “Relaxed hover solutions for multicopters: application to algorithmic redundancy and novel vehicles” gave. However, sometimes the script can generate 2 different solutio...