We studied the paper “A solution to the simultaneous localisation and mapping (SLAM) problem” together this afternoon, and I found out several serious concern about this seminal paper, who has more than 3000 citation. The paper gives 3 main theorems for the extended Kalman filter (EKF) formulation...

Autonomous Hovering of crazyflie using ROS and Optitrack: As a means to get position data from Optitrack on the Ubuntu server controling the hovering of the crazyflie We are using the vrpn_client_ros package: Since it is a new package we modified the launch file from whoeing's repository he...
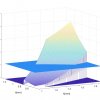
Last week, I simulated mechanical behaviors of monostable beam and CSCP actuator respectively to design a prototype of mechanical oscillator. This figure shows switching force of monostable beam as a funtion of initial rise and thickness of monostable beam. From this figure, we can find how much for...

I wrote an algorithm that can calculate the optimal design parameters of a bistable buckled beam under some given constraints. The calculated parameters are expected to not only satisfy the constraints, but also make designing easy.
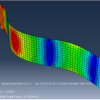
For the passing week, I ran the FEA simulation for the bistable buckled beam. This FEA simulation fuctions as the reference of our analytical model to valide its feasibility. The main result and analysis will be added into our paper. For the following week, Blaire and I will continue to revise the p...
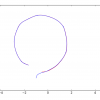
This is a screenshot of my EKF-SLAM code as it is right now. The blue line is the EKF estimate while the red line is the true trajectory. I took inspiration from https://github.com/lucarinelli/EKF_localization_python/blob/master/EKF_localization.ipynb and https://github.com/AtsushiSakai/PythonRobo...
We just submitted our new paper, Localization Algorithm with Circular Representation in 2D and its Similarity to Mammalian Brains. I am excited about the paper since we compare our paper to the methods based on Lie group. Hope the paper can get published!
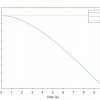
For the past two weeks I have been examining the dynamics model in MATLAB. I separated the linear and angular state variables. When setting the angular velocity of the body to zero and the initial pitch angle to 0.3454 rad, the flyer is able to maintain its position in both y and z directions, while...
For this quarter, I will work with Tsangkai addressing on EM-SLAM problem. First half of quarter: Investigate EM-SLAM problem in detail. Validate the result from "EM-SLAM with Visual/Inertial Application" using Python. Try to achieve convergence of this algorithm. If unable to achieve, figure ou...

For the past week, Blaire and I were working on the paper writing for the analytical modeling of bistable buckled beams with off-center actuation. We worked together to clean up the derivation of our models and finalize Section "Resultes and Disccusion". So far we finished most of the work except...