
This week, I also tested some properties of the motor board, like the relationship input and output relationship between battery and motors. So I try three different setup: The small motor with small propeller The big motor with bigger propeller Both: Try different batteries with a...

This week, I've tested the servo limitation and figure out a way to determine the correct maximum and minimum limitation for different servo motors. So in the example code and in the tutorial, it says: Using the example code, edit SERVOMIN until the low-point of the sweep reaches the mini...

This week I wrote a code to save and visualize the streaming data off-line from opti-track system. The code is now in the github I try different rigid body object in our opti-track system: one of which is on a unmanned vehicle and it's video is shown below. Since the rigid body markers are s...

In order to automate the blimp, we need to consider the problems that we need to solve. By doing research in the behavior of previous manually-controlled blimps and understanding the challenges that the blimp might face to achieve its goal of collecting the green balloons, a function block diagram w...

The ball detection algorithm (without the use of a trained model) has been completed. Following the work posted in the last blogpost, I realized that it may be a better idea to isolate the ball away from its environment and determine its bounding box in the cropped image. The first analysis of the b...
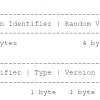
This week I wanted to test the performance of different protocols and mesh-networks. The two biggest characteristics I wanted to determine were range and throughput. My first test was the ESP-Now protocol, which is a peer-to-peer communication protocol near 2.4 GHz. Outside, with a line of sight, I...

During Weeks 1 and 2 of SURP 2021, I indulged myself in studying RoCo’s backend. The backend is equipped with a collection of varying cars, boats, and other 3D objects as well as functions that are used to build these. My task for this summer is to create new designs to be included in the library —...
PROBLEMS WITHIN THE ROCO WEB INTERFACE The web interface of ROCO needs an update and I wanted to list some of the urgent fixes that need to be implemented. Firstly, the thumbnails that are presented within the roco website are not visually appealing. They are models directly pulled from the 3D vie...

This past week, I have been working on setting up the camera hardware for the visual processing that I will be working on. I started by setting up the ESP32 Cam, which uses the Arduino IDE. There is an example for ESP camera boards that can be used to set up a video stream on a web server, which is...
I set up the Adafruit Huzzah32 Feather Board with the FS90R continuous rotation servos (powered by an external power bank), the Adafruit NeoPixel FeatherWing, and the Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout. In addition, I got the Roco library working locally on my computer and wil...