This week I wrote a code to save and visualize the streaming data off-line from opti-track system. The code is now in the github
I try different rigid body object in our opti-track system: one of which is on a unmanned vehicle and it's video is shown below.
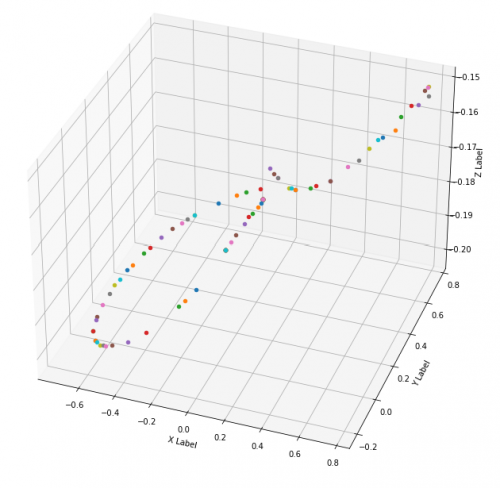
Since the rigid body markers are stable and the unmanned vehicle is moving also stable, the trajectory is perfectly captured under this condition:
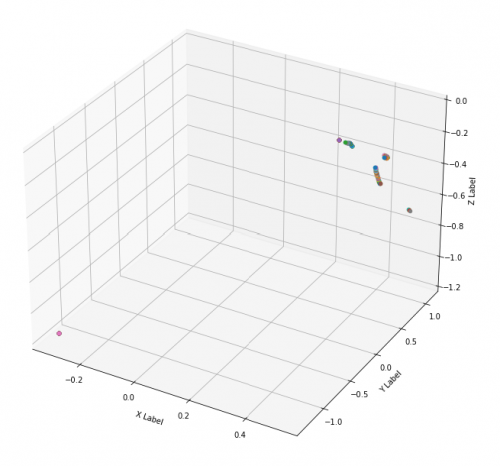
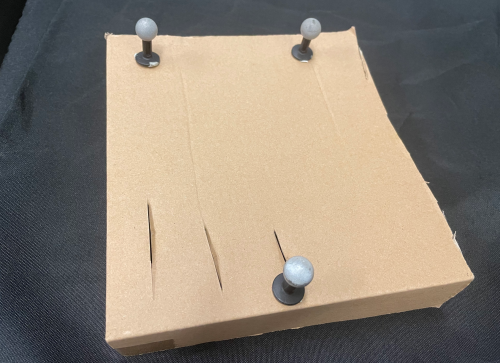
However, when I used an other isolated rigid body:
and then hold the object in my hand and moves it in a circle in space. It was really hard for the opti-track system to capture the trajectory of the rigid body object: