
For the past couple of weeks, Emily and I have been working on an abstract and poster for the Summer Undergraduate Scholars Program that we are a part of. The abstract can be found here and the poster is shown below. I have also been working on multiple lesson plans for the paper robot ca...
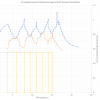
Since we are able to achieve 4 complete oscillations on our mechanical logic last week, we move on to analyze the thermal and electrical data. Each spike in the upper portion of the graph represents the stop point of half of an oscillation. This graph shows that as current is applied to the actuator...

So far, the web interface has realized functions like file process, online compiling, 3D visualization and so on. I improved the input file gramma so that it may help realize a more flexible interface in the process of dynamic and automatic web interface creation. The input file looks like that wh...

Last week, I was able to buy an Ultimaker 2 off of Ebay from an auction. Unfortunately, there were several issues with the printer, making it unfit for quality printing. Two out of the three plastic printhead blocks are broken or cracked; this is NOT something that happened during shipping, becaus...

STL file of the chair was imported into unity3D as seen in the scene. The chair could be transformed in three dimensions through three methods: dragging the spheres in the corner of the box model of the chair, moving sliders and inputting numbers. Translating, rotation and rescaling are also accomp...

Here in below video we put the precision of Optitrack motion capture system to the test. After calibration the system claimed to have only around 0.4 mm of error and as shown in the video we tried to verify this claim. Optitrack data acquisition precision
Last we Wenzhong and I successfully recorded 4 complete oscillations on the mechanical logic. This successfully concludes our goal to create a working mechanical analog of a oscillating system. 1080p 2.mov
This week was a pivotal week for the development of the AR/VR Environment, as both June and I have completed our respective projects and we have started to research into the Unity Multiplayer Networking methods to essentially combine both of these two components together. One of the reasons for usin...
This week we realized in order to send position data from Motion capture system to Crazyflie ROS (Robotic Operation system) is needed. We spent couple days installing Ubuntu and ROS required packages both for Crazyflie and Optitrack Motion capture system. We are also working on motion capture syst...

After finding various robot designs, we looked for lessons that we could potentially make using them. I looked through the Common Core State Standard for Mathematics for the topics covered from grades 5-8 and tried finding related activities to integrate our robots in. Some useful resources I...