Delta-Tolling in Grid-Based Multiagent Systems For a single agent, the problem of warehouse navigation can be considered a simplistic path finding problem over a gridworld environment. With multiple agents existing and acting in this environment, however, the problem of coordinating actions over a...
Goal: 1. Figure out what type of robot design problem can be solved easily & quickly in Webots, so as to give collaborators something to experiment on. 2. Figure out how to 'connect' RoCo to Webots: (1) What file format is needed? (2) How to import components and assemble them in Webots? (...

Goal 1: Get RoCo-designed robots to work well in Webots Problems: RoCo generated .stl file is for presentation, the parts are considered as one solid body, which means there will be no rotational/translational parts simulated in Webots. How to get RoCo generate files that can differentiate t...
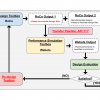
Pehuen and I are working on computational design and evaluation of robots. This project will take realistic manufacturable robotic designs from RoCo and evaluate them in Webots. Flowchart: here is a flow chart that we came up Tasks: the parts that are marked in red are what is missing in thi...
In order to verify the use of camera automation control, I set up a camera on a quadrotor. I will use this as testbed to understand and test some algorithm and data on it. Right now, I can use this camera to proceed Wifi remote control:

The main process of manufacturing a custom Mylar balloon: The post-processing of manufacturing a custom Mylar balloon:
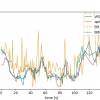
We are now able to demonstrate that the performances of EM-based SLAM algorithms are comparable to that of optimization-based. However, it is not easy to observe that same thing in the real-world dataset. simulation result The first challenge is whether to use IMU data or to only use the output...
Those slides are presenting the evolution of input estimation based on Kalman Filter. I picked up 14 papers as the representatives of those evolution. Next week I would implement the 2d Multi-model and test to see how effective the new MM algorithm perform better than the native one.
LOGICS Project Pehuen and I have been working on building robotic cars & boats from RoCo design system and evaluate their performance in WeBots simulation system. 1. We want to build robots in WeBots directly. Here are some robots that have been built: (1.1) A four-wheeled car Design code:...

Recently, I created a Linux VM system that pre-installed all the software for running a ROS. For beginners, this ROS ready-to-go system will be super easy to use. To use this virtual machine, you need to install VMware first. Go the link1 link2 to download vmware if you don't have one. Th...