Last week, we got new machines for battery fabrication. Now we can created more delicate batteries, as shown in the attached figure. The voltage is about 1 V. However, the current methods can not guarantee the close contact between electrodes and filter paper, which caused extremely lagger resistanc...
Goal: Computational design of foldable robot system -- Computational design of foldable robot bodies, under mechanical specifications (e.g. loading condition) ---- Computational design of building plates in foldable robot bodies ------ Computational design of polygon (irregular-shapped plates)...
This week, I've been working on writing prospectus for my PhD oral exam while working on math for my work. For math, currently, since I want to make my motion planner deal with non-gaussian chance-constraints, I am trying to represent the non-gaussian distribution as the sum of gaussian distribution...
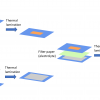
The basic fabrication porocess of the proposed printable battery is shown as the figure. We need to firstly combine the electrodes (Zinc or copper file with pouch sheet), which is completed by thermal lamination, resulting in composite electrodes. It is wotrhting noting that we need to cut a hole on...

This slides present the semantic core prolems and review four representative papers. Further, it told the main problems we met and the potential solutions to those problems. For a brief, the most thing we caring about is the uncertainty of detection or segmentation. Rather than discrete probabiliy...
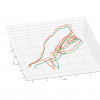
Optimization-based SLAM From the pre-optimization (blue line) to the post-optimization (orange line), we can see that the optimization method enables the loop closure effect. The key improvement lies in the better computer vision techniques by discarding possibly erroneous keypoints. Also, the...
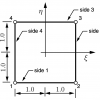
I am currently studying this paper On Solving the Irregularly-Shaped Plate Buckling Problem. "Traditional finite element theory assumes a set of displacement functions that are nodally based and minimizes the potential energy with respcct to the nodal coordinates." "The method of this pa...
Title: Safe Trajectory Optimization of Legged Robots with End-to-End Chance-Constraints with Auto Risk-Tuning Summary: Risk-Aware TO is able to generate various trajectories based on user-defined spacification. However, the commanded violation probability Risk-Aware TO uses does not match to...
Remarks, Week 12/18/2020 Calculation speed increased 50% for calculating trial functions (Turns out more work need to be done for this part during the next two weeks). Automatically determine minimum polynomial order. Calculation speed increased >90% during calculation of residual...
In this blog, I try to motivate the research focusing on motion planning for nonlinear hybrid robots such as legged robots, manipulators. As you know, these robotic systems have very good capabilities for conducting their tasks. For example, legged robot can basically traverse any direction under ro...