Quarter Goals: Do more block tests with my model Use simscape to import CAD model and compare with results from mathematical model from the simulation. Work with Amir to set up autonomous quadcopters Study optimal control and see how it can apply to the single-motor flyer project Current Design of...
This quarter I will be working on: The set up of Crazyswarm (Flying multiple crayflie drones) autonomously using Optitrack motion capture system. The dynamics and mathematical derivation of our last quarter project "The off center spinning mass controller" for quadcopters. Attached is my mile...
These past few weeks my role has been to add networking/communication to CoLo-PE (CoLo Physical Experiments). Previously when evaluating the performance of a localization algorithm, CoLo would infer the connection strength between each of the robots from the relative distance between each of them (...

This blog is a bit technical, but here it goes. The last blog focused on the write up side of my project, but this time, I will focus on how I attempted to replicate my 1/8th scale autonomous RC car results for my 1/32 scale vehicles. -Data Collection- The image above is an image straight fro...
Last week I measured the performance impact of sending and receiving messages over a Bluetooth link to see how well it would scale up if needed. The metrics I chose were the percentages of CPU and RAM used by the running process. To collect this data, two common tools came to mind: ps and top....
At the same time I worked on modeling the critical force and critical displacement of the bistable beam, I also looked into the way these behavioral parameters affected the final output parameter of the system--the oscillation period of the mechanical logic. I integrated the models for the mechanica...
Due to the shortcomings of the ROM (it's really hard to translate into our fast, model-based design method for the mechanical logic), I have started to work with a new model that we used for the ISER paper (it turned out more than a piecewise linear model that came to the rescue at that time). This...
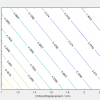
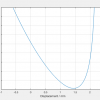
Last week, we reviewed the current state setup of the linearization script. Since the derivative of the total thrust cannot be calculated from the definition of the derivative, the total thrust should not be in the state. The error comes from misunderstanding of one of the equatoins of the original...
Once I constructed the the mesh of our track in Meshlab I needed to import the mesh into unity. Unfortunately Unity does not read per vertex colors so I a made a texture from the mesh so that it could be applied to the colorless mesh I imported to unity. However the texture I created using the per t...