
Making SCP Actuators.pdf Final_Coil_Insertion_Code.ino
The following is a short overview of the process by which the characteristic velocity of the vehicle is determined from local information. Let \(v(t)\) be the velocity of the vehicle at time \(t\). In the presence of traffic jams, \(v(t)\) will be wave like. A sample of different possible solu...
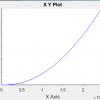
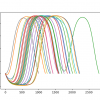
Simulate Motor Thrust in Simulink On Crazyflie, the spinning of motor and propeller will introduce a thrust onto the system. According to Crazyflie Wiki page (https://wiki.bitcraze.io/misc:investigations:thrust), the relationship between the motor spinning speed (rpm) and the thrust force (g) can...
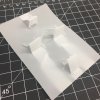
This week, the new design of mechanical logic was created and prototyped. The new mechanical logic employs bistable beam structure to function as switch. In this manner, the reliability and assemblability of the structure are greatly improved. By the way, it just needs 20 mins to finish the assemble...

In the very beginning of the SCP actuator fabrication process, a major obstacle was attaching the thread to the very center of the stepper motor shaft. As a result, I decided to 3D print a part that would satisfy all of the necessary conditions (fit directly in the center of the shaft and have a hoo...
After a couple of weeks' writeup and figuring out about the details, here we finally have the final version of the prelab for Crazyflie. This lab is to test some new parts to see whether we can replace the original parts by them to increase the thrust produced. Currently the maximum thrust created i...
We have already proposed a multirobot localization algorithm that separates communication and observation as two independent mechanisms as well as keeps the estimation consistency. However, while localization is not the main goal but the support of more high-level tasks in most of the robotic system...

The goal for the project of 'Antonomous printable robot' is to create a printable antonomous paper robot, which is only made of power source(e.g. battery), paper and conductive thread. The biggest challenge is to control locomotion of robot without computer chips. The proposed solution is to design...
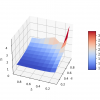
Motion Simulation Using Simulink Using Simscape Multibody, we can import a CAD model into Simulink and test system dynamic response. A Crazyflie 2.0 CAD model from https://github.com/rshum19/Crazyflie-CAD were downloaded and modified using AutoDesk Inventor, then exported to Simscape Multibody and...
This past week I have finalized the designs for my robotic hand and arm and am able to use the now consistent fabrication process to output a length I want based on the precursor length and annealed length with the following equation: (0.26)x = annealed/expanded length For example, if you want an...