Simulate Motor Thrust in Simulink
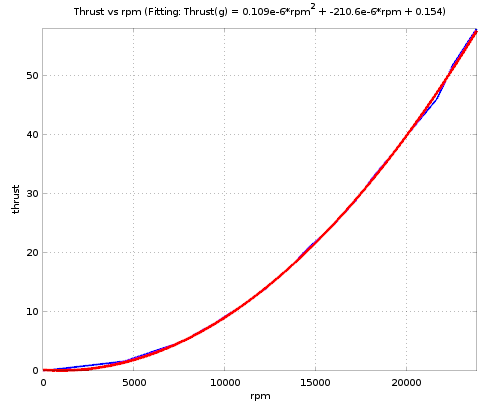
On Crazyflie, the spinning of motor and propeller will introduce a thrust onto the system. According to Crazyflie Wiki page (https://wiki.bitcraze.io/misc:investigations:thrust), the relationship between the motor spinning speed (rpm) and the thrust force (g) can be estimated as a polyfit function: 1.0942e-07rpm^2 - 2.1059e-04rpm + 1.5417e-01. The fitted curve is shown in the figure below.
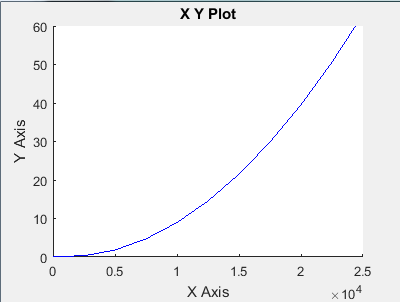
Following this equation, we add a thrust calculation block onto the system. This block reads in the rpm signal and computes the thrust as output. The test result of this block is shown in a x-y graph, with X-axis represent the rpm input and Y-axis represent the thrust output.
In addition to the thrust, each propeller also produces a torque onto the system. According to paper [1], there is a strong linear relationship between a propeller’s reaction torque and thrust force.
[1] Mark W. Mueller and Raffaello D’Andrea "Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers"