For mathematical simplicity, most dynamical models of traffic systems are examined on ring roads where the last vehicle in a platoon affects the first vehicle as if it was in front of it. Moreover, control systems for autonomous vehicles, such as those proposed by Daniel Work et al., have been exclu...

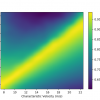
This week progress continues mainly on two fronts: calculation of FOM for both the FollowerStopper and PI with saturation, and implementation of a deep learning model for computation of the characteristic velocity. For the FOM, we are doing more simulations of the FollowerStopper when the command ve...
While progress on implementing the machine learning for the controller continues, I thought I would an update on the new FOM (figures of merit) for the autonomous controllers, which are used to evaluate the ability of the autonomous controller to reduce traffic. The new figures are the result of sev...
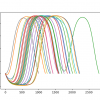
The following is a short overview of the process by which the characteristic velocity of the vehicle is determined from local information. Let \(v(t)\) be the velocity of the vehicle at time \(t\). In the presence of traffic jams, \(v(t)\) will be wave like. A sample of different possible solu...
Results published in the paper "Dissipation of stop-and-go waves via control of autonomous vehicles" show that it is possible in principle to mitigate the propagation of traffic waves on a ringroad using a single autonomous vehicle. The proposed controller for the vehicle, called the Follower-Stop...
- «
- »