The dynamics for single motor flyer in 3D space is very similar to the one for four-motor drone system. The main difference is that for the single motor system, only one propeller is rotating. Basing on the simulation for four motor drone, a new matlab simulation was created to describe the behavior...
The inner control loop for the single motor system is a LQR control loop, which controls only the two attitude degrees of freedom relevant to the vehicle’s translational motion. To use LQR controller, the first step is to linearlize about the hover solution, so that the system becomes a linear syste...
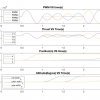
Four Motor Drone Dynamic model simulations The first simulation is performed with an ideal drone model. The PWMs for each motor were changed over time to achieve hover, z motion and roll, pitch and yaw motions. No noise were introduced in this simulation. Figure 1 shows the result of this simulati...
Research on how to measure/estimate reaction torque In addition to thrust force, a spinning propeller will also introduce reaction torque onto system. According to paper [1], there is a strong linear relationship between a propeller’s reaction torque and thrust force. Once this relationship is fou...
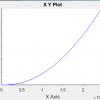
Simulate Motor Thrust in Simulink On Crazyflie, the spinning of motor and propeller will introduce a thrust onto the system. According to Crazyflie Wiki page (https://wiki.bitcraze.io/misc:investigations:thrust), the relationship between the motor spinning speed (rpm) and the thrust force (g) can...
Motion Simulation Using Simulink Using Simscape Multibody, we can import a CAD model into Simulink and test system dynamic response. A Crazyflie 2.0 CAD model from https://github.com/rshum19/Crazyflie-CAD were downloaded and modified using AutoDesk Inventor, then exported to Simscape Multibody and...

Last week I particapted the monthly research hackathon focusing on computational fabrication. We made a pop-up design of furniture module using Silhouette cutting machine. The design was inspired by pop up cards and was aimed to cut a single piece of board to form foldable furnitures such as tables...
Last week I studied Loco system, which is a posibile solution to estimate the absolute position of crazyflie. The system has two parts: a Loco deck add on crazyflie and 4 Loco anchors at ground. The system as whole works as a mini GPS system and calculate crazyflie's 3D position. For the simulator I...
Last week I researched how to get state estimates from Inertial Measurement Unit (IMU). There are 12 states needs to be measured for a flying device: position, velocity, attitude and angular velocity in three-dimensional space. An IMU usually contains accelerometers and gyroscopes, sometimes also ma...
This week I worked with Jerry, Likai and Carol to test Crazyflie's thrust force. We used the method from [1] to measure the thrust force created by one motor and one propeller on crazyflie with different PWM signal. From the measurement, we conclude the system needs more than one motor to provide en...