The inner control loop for the single motor system is a LQR control loop, which controls only the two attitude degrees of freedom relevant to the vehicle’s translational motion.
To use LQR controller, the first step is to linearlize about the hover solution, so that the system becomes a linear system which has the following format:
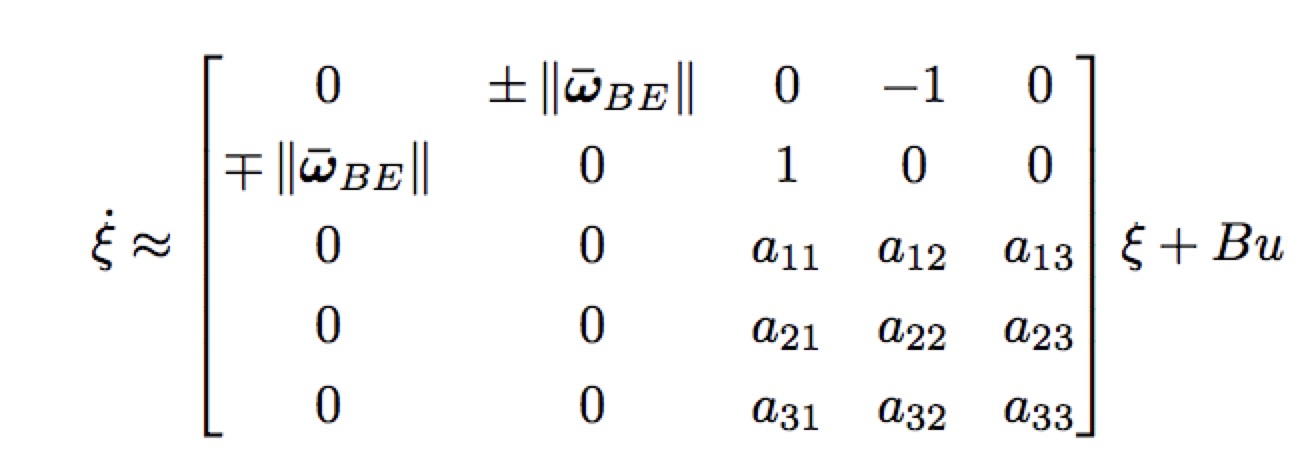 (Picture from “Relaxed hover solutions for multicopters: application to
algorithmic redundancy and novel vehicles” (ZTH, 2015))
(Picture from “Relaxed hover solutions for multicopters: application to
algorithmic redundancy and novel vehicles” (ZTH, 2015))
The inner control loop for the single motor system is a LQR control loop, which controls only the two attitude degrees of freedom relevant to the vehicle’s translational motion.
To use LQR controller, the first step is to linearlize about the hover solution, so that the system becomes a linear system which has the following format:
(Picture from “Relaxed hover solutions for multicopters: application to
algorithmic redundancy and novel vehicles” (ZTH, 2015))