
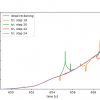
My new journal paper "BTO-RRT: A rapid, optimal, smooth and point cloud based path planning algorithm" has been successfully submitted to Journal of Intelligent & Robotic Systems(JINT). This work is supported by the Laboratory for Embedded Machines and Ubiquitous Robotics(LEMUR) @UCLA, the Dron...
What are we working on? Computational design of origami structure, based on mechanical specifications. Why are we doing this work? Advantages of origami structures: (1) tunable mechanical properties; (2) ease of design; (3) inexpensive and rapid manufacturing; (4) light weight with hi...
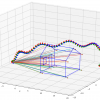
gitlablink Frame Introduction Body frame: IMU Coordinate Cam frame: Camera Coordinate World frame: The firt frame of IMU frames Navigation frame: ENU \((0,0,-9.81)\) Core Idea 1. Essential Members in IMU and Camera: imu_acc/imu_acc_bias/acc_noise_sigma/acc_bias_...

I did a test of different motor configuration than before. In this motor configuration, each of the three motors will control 1 DoF.

I improved the design of gondola that the current version has a lighter weight than before. And the motor drivers are fixed onto the gondola to be more stable. Also, 1'' jumper wires are used to reduce the total weight. Before: After:

Recently, I have been working on connecting the ESP Wifi Module and the Blynk software. I have been looking into both emulation and ESP Now. Additionally, the Blynk software for controlling the motors does have capabilities with Bluetooth, so I will also be testing the Blynk software with my HC-05 m...
Microcontroller - ESP32 Motor Driver - TB6612FNG Dual Motor Driver Propeller Size - 45mm (diameter) Communication - WIFI Module using Blynk I also found out that ESP32 does not have a native implementation of the AnalogWrite function. This has led to problems for PWM. I will look for a...
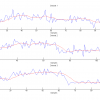
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....
The SLAM frontend, in my definition, finds the features in the image and assigns the same landmark id to matched images. The overall SLAM performance relies on the quality of observation file provided by the frontend, as well as the optimization problem established by the backend. Frontend The...

The past two weeks, I have been developing different balloon facing mechanisms with the goal of creating one that improves the blimp's capability to control the balloon. My first idea was to build a "fence" made out of barbecue skewers and mount it onto the top of the blimp. The idea was that th...