
This week I redesigned an algorithm that calculates design parameters of the mechanical logic this week. Given that there are so many degrees of freedom, we need to find something to optimize and thus determine the best possible combination of parameters. One thing to optimize is the robustness--if...

This week I went through the Roco source codes related to building the components. With that understanding, I build a artificial perpendicular connection in 3D using the current Roco implementation which is based on origami. It occurred to me that any furniture built based on origami is actually iso...
Classic approaches to tackle simultaneously localization and mapping (SLAM) are based on estimation problem. That is, robots try to estimate it position as well as landmark concurrently where both positions are modeled as random variables. A series of works formulate SLAM differently by modeling t...

During Weeks 1 and 2 I worked on improving the way we started the robots CoLo-PE by moving from using Ubuntu's Remote Desktop solution to issuing remote commands with ssh. To emulate the functionality of the robot_full_run.sh script which opens up several xterm windows each running a different ROS...

CoLo, a cooperative localiztion algorithm evaluation system, is accpeted to the 2019 International Conference on Robotics and Automation (ICRA), which will be held on May 20-24, 2019 in Montreal, Canada!

The following steps are used to update the dynamics of an aerial robot. Calculate the rotation matrix R from the last iteration's Euler Angle θ. Calculate angular acceleration given current force and torque inputs, and the angular velocity from last iteraion. Update angular velocity Calculat...

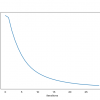
This week I wrote codes that can help design the bistable beam-CSCP actuator system under certain contraints (e.g. oscillation frequency). The way my codes work reflects my flowchart last week. Since there are a lot of possible combinations of design parameters that may make the mechanical logic o...
To debug what causes the divergence of EM-SLAM algorithm, I Separated E-step and M-step. To prove M-step is correct, every time I will feed a true Q-function from E-step to M-step. i.e. x=x_true, P=0. (Note in general, Q-function contains trajectory information and it is always estimated in E-step)....

For the first part of this week, I read Wenzhong's research proposal and got an understanding of general ideas behind this project. For this quarter, my subtask of this project is trying to solve : (1) Multiple faces on one edge, so that the project can build furniture with nultiple levels, such as...
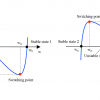
I keep revising our paper for the pasting week. Especialliy, we added a figure to demonstrate the snap-through properties of bistable buckled beams and corresponding critical behavioral values (i.e. critical force, critical displacement and travel) ,as shown below. Also, I finished first draft of...