
The paper of CoLo has just finished revision for ICRA 2019! We have edited the paper in order to explain things more clearly. After submission, we will continue to work on the communication between robots and cost for each robotic operation: measurement, propagation and communication. Special thanks...

In CoLo, there are two options for communication in CoLo-AT: real-world data or simulated data. Users will use the Communication Controller (C-C) to define a communication scheme and output the index for the sender and the index for the sender at the time step. For real-world data. the Dataset Man...

CoLo, a cooperative localiztion algorithm evaluation system, is accpeted to the 2019 International Conference on Robotics and Automation (ICRA), which will be held on May 20-24, 2019 in Montreal, Canada!

This is part 2 of the slam algorithm overview focused on Particle Filter related SLAM algorithms. It is aimed to provide readers some basic understandings on different SLAM algorithms and their relationships.
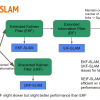
This is part 1 of the slam algorithm overview focused on Kalman Filter related SLAM algorithms. It is aimed to provide readers some basic understandings on different SLAM algorithms and their relationships.
Hers is the demo for full system testing v2 of our SLAM Physical Experiment: 2 robots and 3 landmark with better animation colo_full_test_v3 (1).mp4
Hers is the demo for full system testing v2 of our SLAM Physical Experiment: 2 robots and 1 landmark. colo_full_test_v2.mp4
Hers is the demo for full system testing of our SLAM Physical Experiment: 1 robot and 1 landmark. colo_full_test_demo.mp4 pe_full_test_demo.mp4
Here is the video demo showing using data collected by ros packages(aruco-detect aruco-record) transfer to CoLo to perform localization using measurement data only(algo: EKF) Note: the groudtuth file and odometry file are unreliable aruco_colo_demo.mp4 aruco_colo_phy_demo(1).mp4

CoLo has been redesigned for better compatibility and modularity so that it can be easier for user to modify the environment and adding new algorithm. So far, the majority of the new version of CoLo has been implemented. Later, we will add a more powerful analyzer to the environment! Also, we still...