I've been testing the adafruit feather board software and hardware recently and I found some very interesting problems: Upload program In the windows, when upload program to the feather board, it doesn't have to press the reset button. But in the Linux, it has to press the button in order...
According to the reply from the editor of Journal of Intelligent & Robotic Systems(JINT). The system returned it back to author because it was incorrectly submitted. I'm still communicating with the editor to find out why. The previous reason I thought was I need to link the repository, which it h...

Over the last two weeks, I have been working on the existing code by Parth Agrawal for the estimation of the location of the green ball from images that were shot at different angles. The code had estimated the position of the ball quite well for the hi-def images but not so for the 800x600 images:...
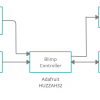
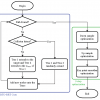
The general idea of the blimp autonomy is that the controller that we are using for the blimp will receive multiple inputs which will determine how the blimp is going to move. On a high level, the camera detect the objects like the green balloon, opponent's blimp, and the goal post. That, along with...
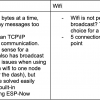
Over the past week, I have been looking into what are the best tools/ways to create a mesh network for our ESP32 boards that will be attached to the blimps. The three frequencies we want to add to diversify are 2.4 GHz, 433 MHz radio, and mmWave 20 GHz. For the 2.4 GHz option, ESP-now looked like...
Dash I worked with the team of undergrads to develop this initial list of requirements for the dashboard. It's based on the kinds of experiments we plan to run and what kinds of data will be relevant. Of course, this is a preliminary list only, but I've specified that we will use modular design so...
RoCo demonstration brainstorming We came up with some challenging problems for RoCo demo and we will keep brainstorming. (Thank you Nabeel and Mauricio) Here are some ideas (currently focusing on Paperbot, will extend to other robots later on): Robot going through large ridges or bumps: robot...

Last weekend, I manufactured a PE balloon envelope. Here is the manufacture process: The PE balloon after inflated: The total lifting capacity is about 41 g. The total weight of the electronics of the control and sensing part is about 27g:

Current progress: In the past week, I tested the opti-track system streaming function. Before, after I used opti-track to capture the motion of our flying blimps, I had to manually import the data to a csv file and then process the csv file. This whole process took a very long time since in the...

Looking into old work to refresh on simple contact dynamics for nonholonomic systems: