
Yesterday, Jill and I were able to successfully integrate the mesh network with three of her paper cars. We were testing the ability to send instructions to multiple vehicles over the network. Since our 433 MHz packet radios in tests would send messages within three milliseconds and the painlessMesh...

I'm still testing the property of different motor + propellers combination. Right now, since I also got the requirement from the AR blimp, I'll add one more test on to my previous experiments. The current experiment setup: So the properties of motor + propellers that I will cover in my exper...

I've had several flying tests this week to see how does feather board esp32 performs. Before I started the flying test, I need to configure the motor setup using inputs commands: The flying test of moving forward: an other angle of view: So this phenomenon(The forward motor completely...
I've finished the code that could by changing the input commands to get the correct FBUDLR(forward/backward/up/down/left/right) motor outputs: Use case: how to get the correct motor outputs after someone rewire the hardware The code is now in the github
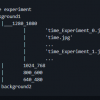
This week, I've collected the green ball data with distance from two different scenarios: 1) Lab background 2) Conference room background The green ball data is constructed in the following tree structure: distance experiment |___background1 |___1280_1080 | 'time_Experime...
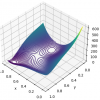
Over the last few days, I took some time formatting and labelling the newly obtained images of the ball at different distances from the camera. Following this, I passed the bounding box information through a regression model to detect the relation between the size of the bounding box (relative to th...
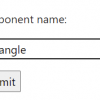
Yesterday, I was able to take in html values with python scripts using POST method. The key was passing in the value of the input with html forms. I'm not sure if we can pass in (input) tag values, but doing it with forms and POST method seemed to work, so that will be something that I will stick wi...
Last week, I also started to develop the functionality of adding components within the webapp. When typing user input values in the python terminal, we can add components using the "addSubcomponent()" function from RoCo. I'm currently implementing this further so that we can observe the changes onl...

This week, our team of summer undergrads began planning the integration of all of our projects together into one big integrated demo. So, I had to start making my networking code and hardware easy to add into and use in my peers’ projects. To do so, I switched from using the small 433 MHz packet rad...