
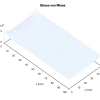
Part 1: Correcting Y Direction Deflection Y direction deflection correction Following last week's blog post, I modified our design tool. The new results show a better match for y-direction deflection. Here are some of the results: 1. FCFC, clamped on longer edges, forces on shorter edges...
Scaling multi-agent solutions is difficult due to the exponentional growth in state space. To this end we are implementing a local field of view for each agent. Each agents local goal will be determined by running A* over the entire space and finding the last position in the field of view. This fo...
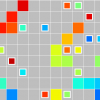
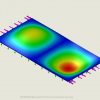
1. Here is the intermedium results: plane stress of a CFFF rectangle plate, with uniaxial load The magnitude is the same, results are close (at least visually). Stress u direction displacement v direction displacement (results do not match well, but this is not the direction of interes...

We tested two FPV cameras on a flying blimp. The Search camera looks aweseome:

The vertical and horizontal control of the new design:
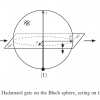
Last month Tsang-Kai emailed me his proof for the solution for KL Average for von Mises-Fisher distributions. Now we are looking for ways in which we can apply this to different real engineering problems that exist. One interesting application of von Mises-Fisher distributions is in Quantum Infor...
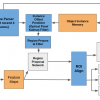
Bryan Bednarski - April 8, 2021 This repo serves as a jumping-off point for system integration of semantic instance segmentation and multi-object tracking in real-time applications. The initial goal of this work was the explore possible optimizations in semantic segmentation through tried-and-true...
In our previous paper, we investigate the consensus problem with von Mises distribution. We want to extend our analysis to more general distributions, in particular the von Mises-Fisher (vMF) distribution over hyperspheres. In fact, vMF distributions are used in some machine learning algorithms. I...
There are three steps I will take in order to implement this design tool: Step 1: Verify I operate correctly in FEA (Solidworks Simulation). In order to do this, I will use some existing numerical solution and/or analytical solutions to find out critical buckling load. Then I will apply this criti...
Vertical control on the newly design balloon: We will start testing horizontal control shortly.