
I have been working on allowing the user to review their robots runs within the dashboard. There is now a Download txt file button at the top of the screen, which allows one to download a text file containing a JSON object that represents every input the dashboard received. However, this currentl...

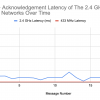
I have built the first prototype of a boat with rudder steering. This video shows the rudder steering in action. We ran the boat four times and obtained these results: When the rudder is straight, the boat goes (relatively) straight. When the rudder is tilted to the left, the boat veers to...
Last week, the two biggest things that we accomplished were making one node in the mesh network into an MQTT bridge, which would connect to an MQTT broker to be able to use the dash with the mesh network, as well as set up the RFM69HCW 433 MHz packet radios into a unicast mesh network. So, using t...
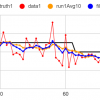
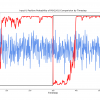
Last week, I worked on filtering three independent data streams from barometers using a simple Kalman filter. The output is given below: The black lines represent the ground truth, the red dots represent each data point, the orange curve represents the output of a running average filter with 1...
The previous illustration is in this link This post is mainly talking about the error fixed in the MM estimator. The biggest error of the MM estimator in derivation and code is that: The error is: In the matrices, I used the scalar 1 to replace identity matrix I. For example, using (1-K) to re...

Last week, I set up the RFM69HCW 433 MHz radio hardware to be able send messages from one radio to the other. Below is a picture of the set up. I have the 433 MHz packet radio on a breadboard and connected to an ESP32 Feather Board, as well as attached to a quarter-wavelength antenna (about 17 centi...
Building upon the work that was done last week, the goal this week was to include some sort of motion actuation to demonstrate that a vehicle can track a specific blob of a specific color using the OpenMV camera. However, due to setback in the goal of making a blimp, we decided to proceed with a sma...

For the 4th week of SURP, I managed to produce the cars (with the help of my fellow Arnhold teammate Grace) that I built using the roco library. I had to make several adjustments to the size of the cars and the locations of the holes or decorations on its surface. **Note that on the pic below (right...
For the past two weeks I was working on the zoom issue we have with the svg model. However, I was stumped with the codes of the web interface because the condition that already exists, does not work even though the codes appear to be correct. This is the condition: This simple if statement is sup...
After completing the boat's electrical base, I began testing different paper chassis designs for driven propellers and paddlewheels. I used the dashboard joystick to control the motors wirelessly while noting each boat's performance. The paddlewheels use servos driven by the Adafruit Servo FeatherWi...