Introduction What's the goal for this specific project? Building lightweight corrugation structures that satisfy stiffness requirement while optimize the weight (as low as possible). What have been accomplished so far and what will be accomplished? (1) We have developed easy-to-use analy...

This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below. Motor Test: Your browser does not support the video tag. I then integr...
In the past week, I did an experiment on controlling 2 blimps using Blynk app. The videos are shown as follows: The short version: The long version: The settings for two blimps are as follows: The Dolly fish has 4 small 12mm motors: 2 for horizontal control and 2 for vertical control ...

I was looking for ways to control the motors using peripheral hardware. I initially used Keyboard to control the motors. The input characters were sent to an ESP32 device (Master) via serial communication. The data was sent to another ESP32 device (Slave) connected to the motor drivers. I used a 2.4...
This week, I assemble the second blimp while I can switch the control between the two blimps using Blynk app. This is important because we have very limited number of commander while the number of blimps is at least the double of the number of commanders. Video:
Hi All, I have collected a list of machines and hardwares we have. I make some training videos and I also put some useful YouTube videos on it in case you need to learn how to use the machine. It's on our internal page. Please feel free to let me know if you need me to add anything more to i...

The basic fabrication of a printable battery includes electode formation and battery packaging. Here I use a Li-ion battery as an example. The first step is the electode fabrication, which includes slurry preparation, coating, cutting of electrode, electrode calendaring, electrode slitting, and t...
Optimization-based motion planning approaches, such asNonlinear Programming (NLP) and Mixed-Integer Programming (MIP), solve optimization problems, and find solutions using gradient descent while satisfying constraints. For instance, CHOMP optimizes a cost functional using covariant gradient descent...
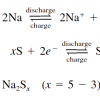
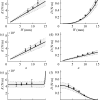
For our printable robots, we are planning to integrate printed battery as on-baord power. Currently, we choose Na-ion battery given the relative high voltage, low resistance, low cost, and high drain current, etc. There are two main types of Na-ion battery, i.e. sodium/sulfur battery and sodium/meta...

I've completed the first distributed prototype blimp at home. I adapted 2-1 motor configuration and it has 3 DOF: The control video demonstration: Some observations: The steering is really difficult to control because I only use one slider to control the speed of all motors. And it needs t...